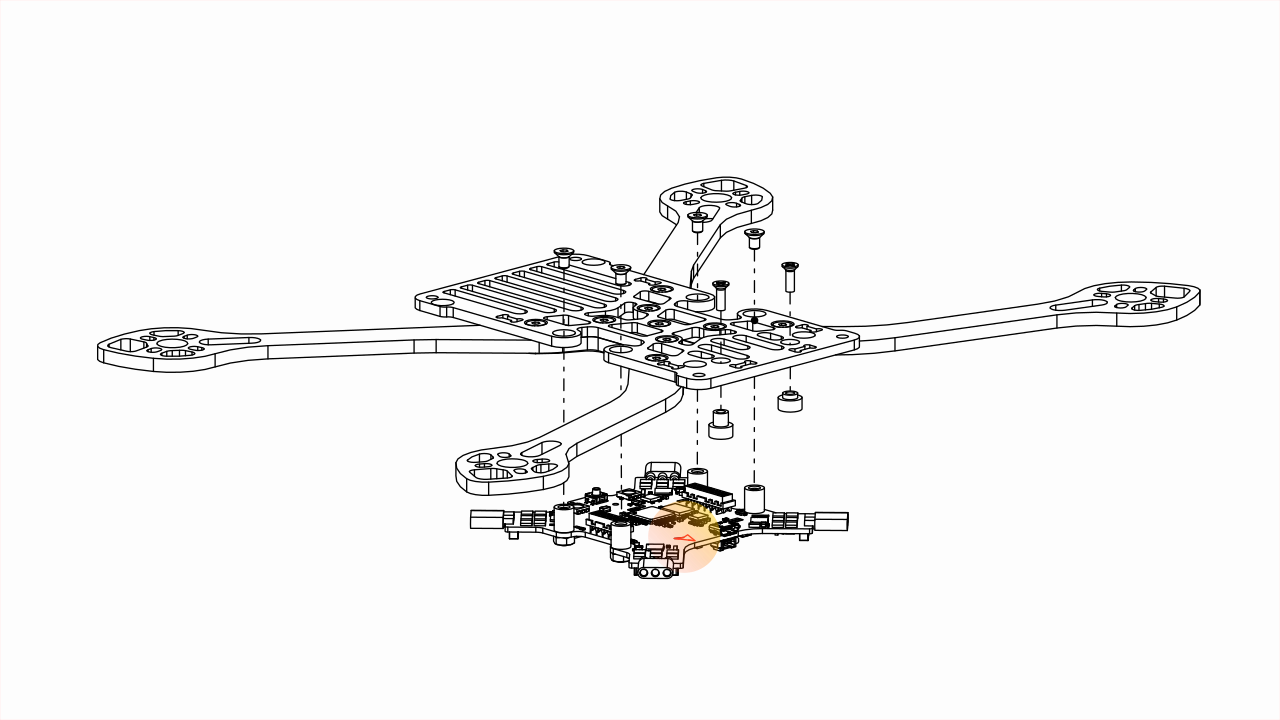
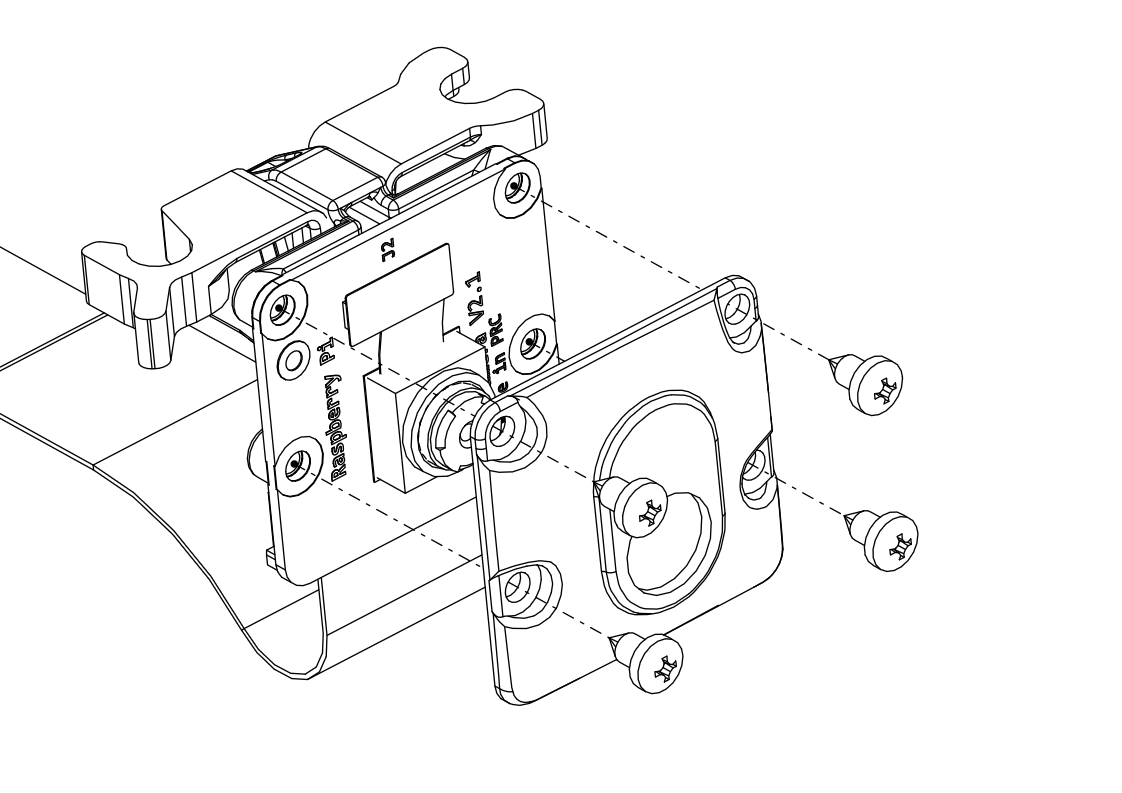
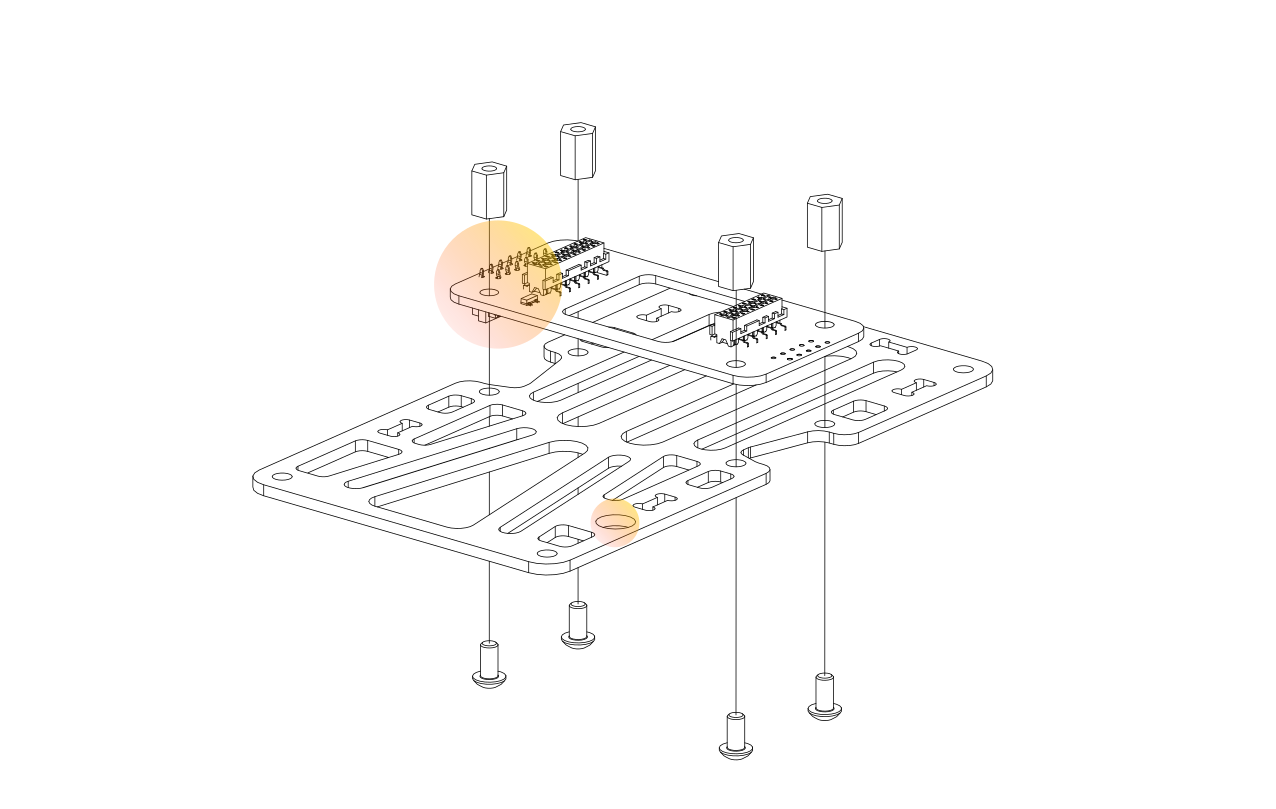
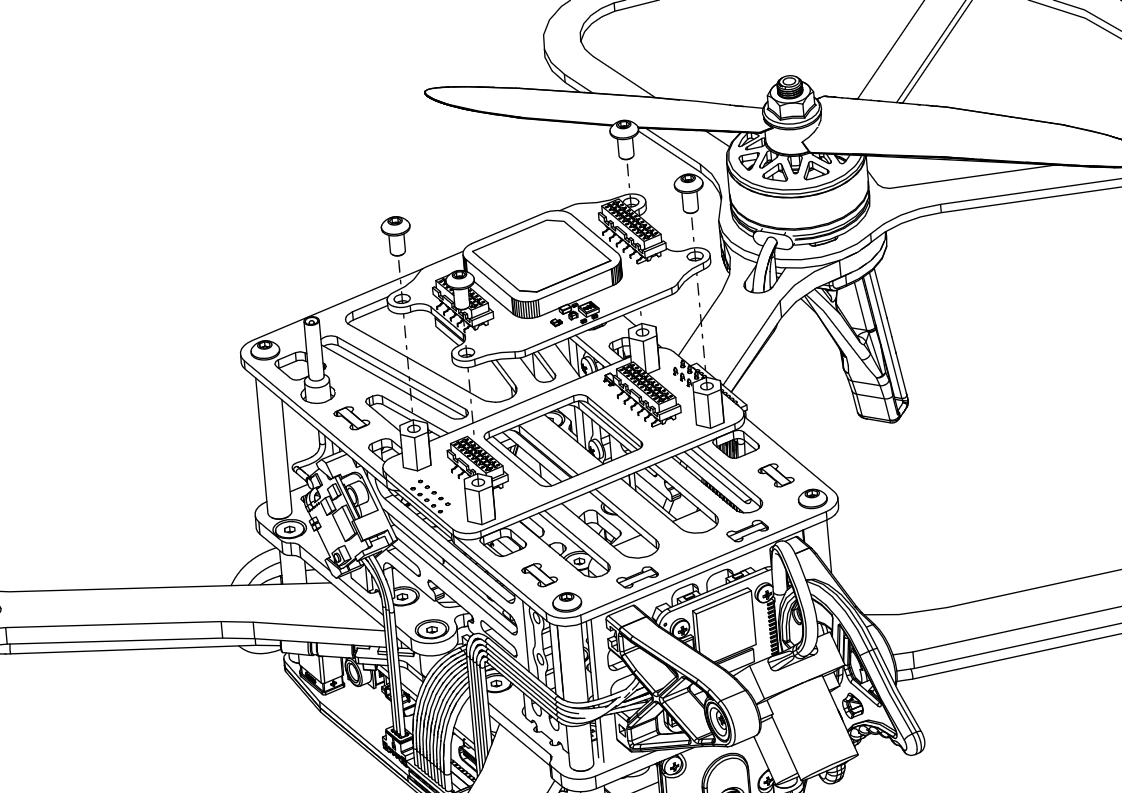
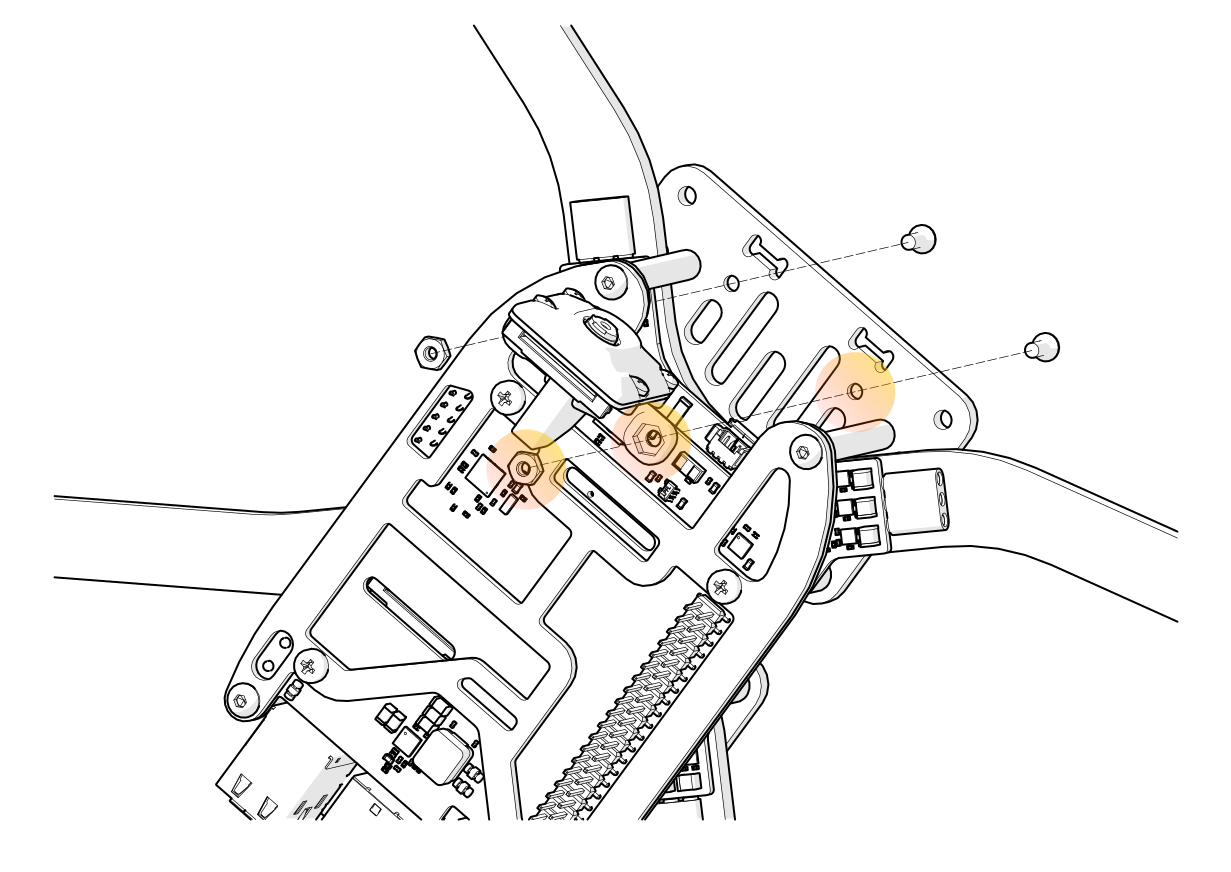
Закрепите снизу центральной пластины крепление кронштейна Raspberry
Camera с помощью двух винтов М2.5х8. После чего закрепите модуль
автопилота при помощи винтов 4-х M3х5, как показано на рисунке. Обратите
внимание на иконку “стрелки” на плате, она обозначает направление
вперед.
Внимание
В зависимости от конкретной поставки, кронштейн камеры может
отличаться, чтобы посмотреть, как установить другой кронштейн перейдите
по ссылке. Установка старого кроншейна Raspberry Camera. Устанавливайте кронштейн только после настройки модуля автопилота. Как это сделать можно посмотреть на странице: «Настройка Пионер Макс.
Подсказка
Скачать архив с моделью нового кронштейна вы можете по ссылке:
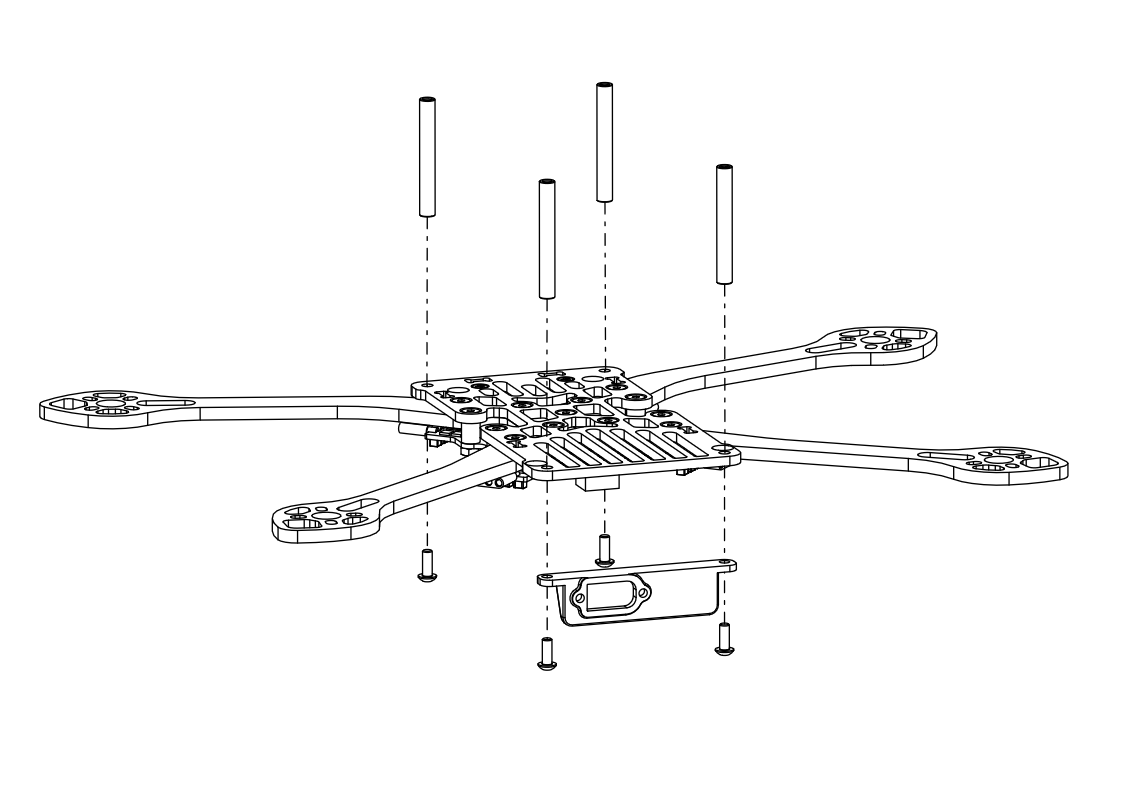
Используются: стойка 37х5 мм - 4 шт., винты ISO 7380 M3х8 - 4 шт.,
кронштейн разъема питания – 1 шт.¶
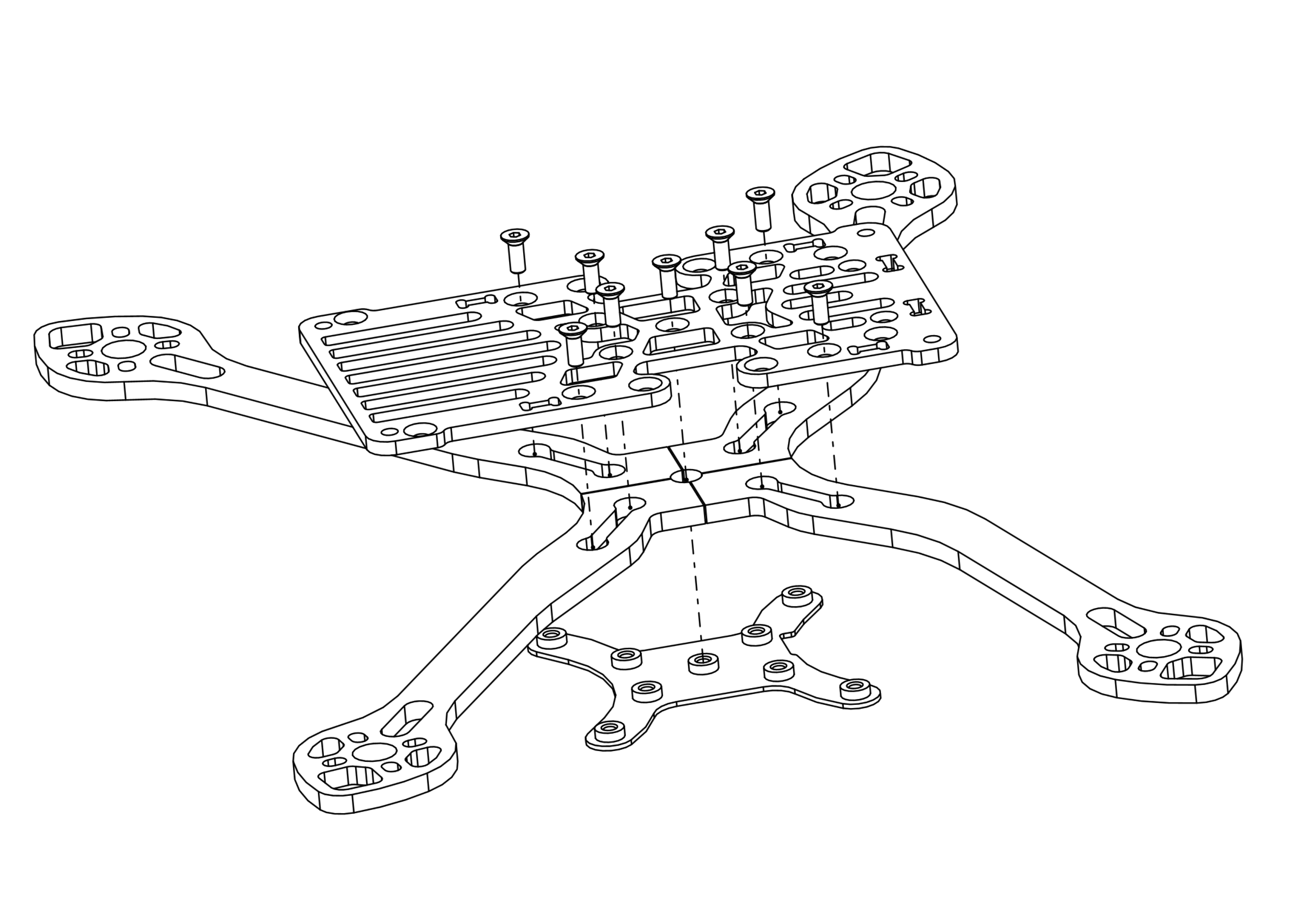
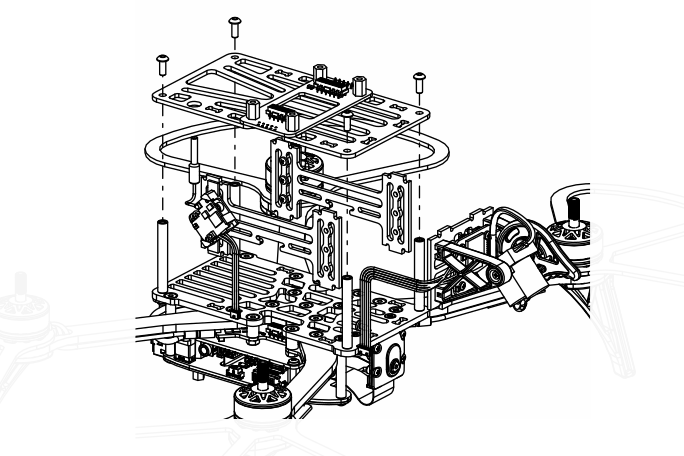
Установите четыре стойки с помощью винтов M3x8, перед установкой задних
стоек не забудьте под основание рамы установить кронштейн разъема
питания и только после этого установите задние стойки.
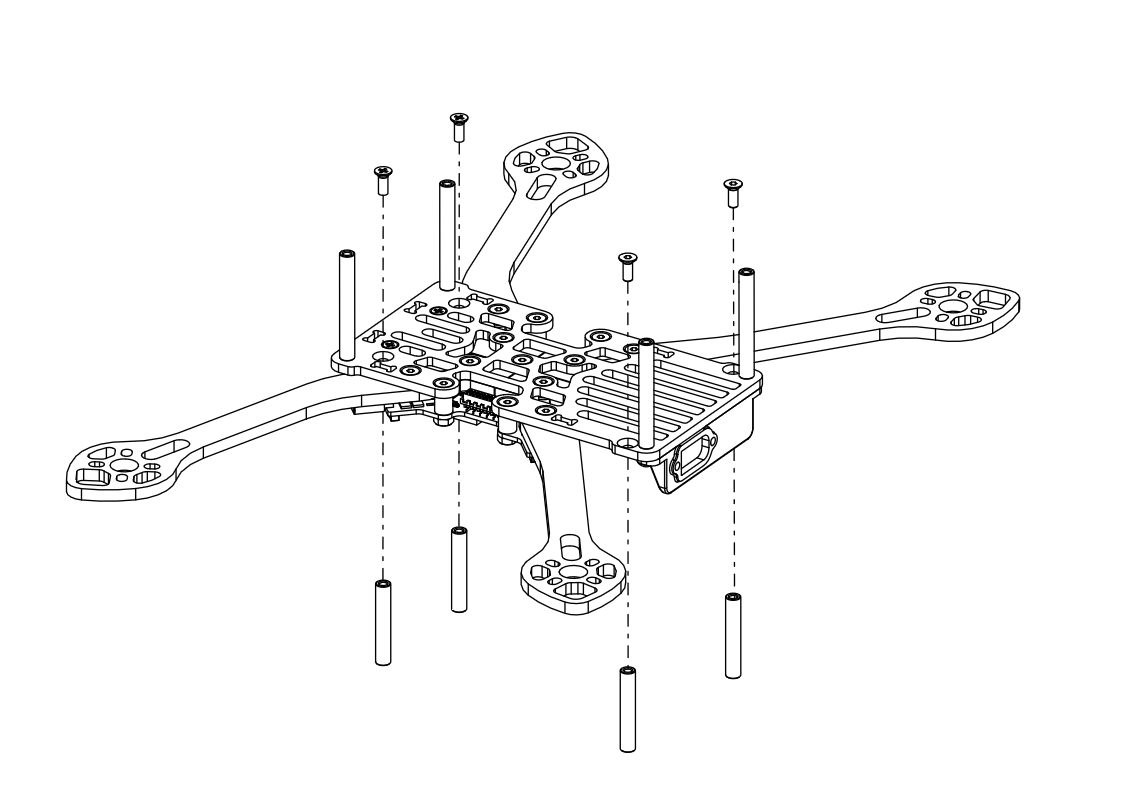
Шаг 4
Используются: стойка 28х5 мм - 4 шт., винты DIN 7991M3х8 - 4 шт.¶
С помощью винтов М3х8 закрепите на нижней стороне центрального основания
рамы четыре стойки 28 мм, как показано на рисунке.
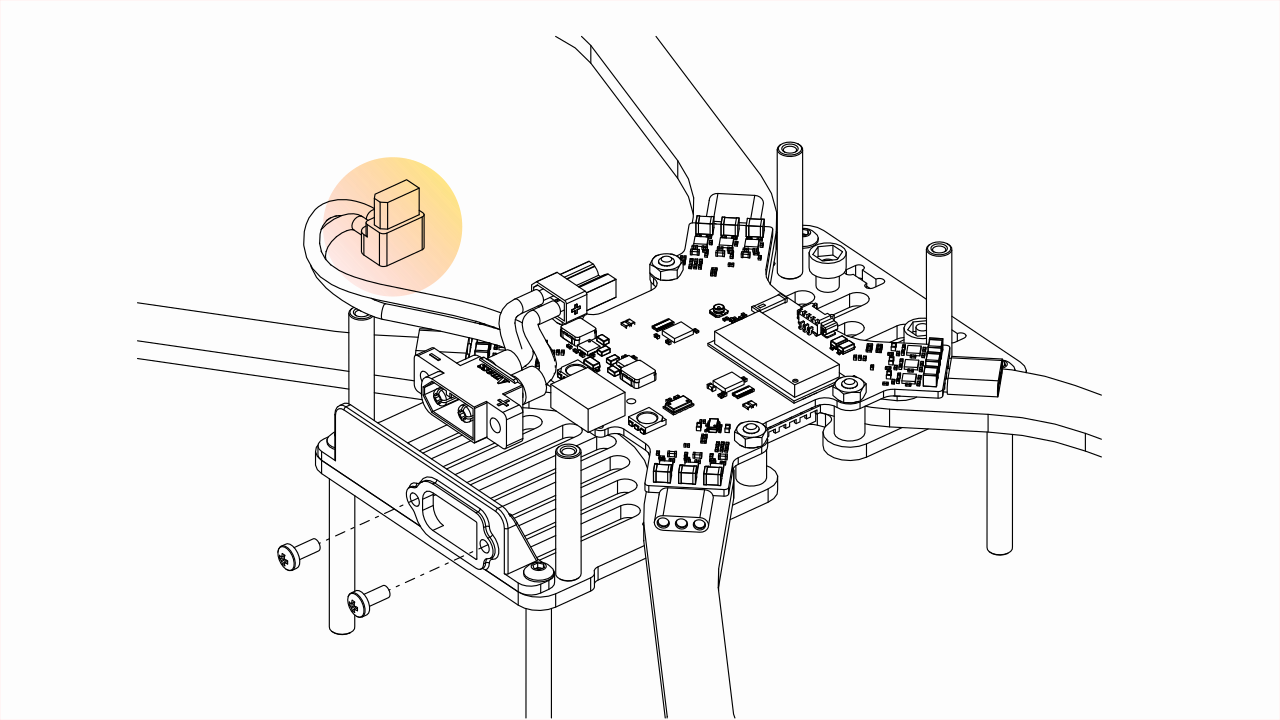
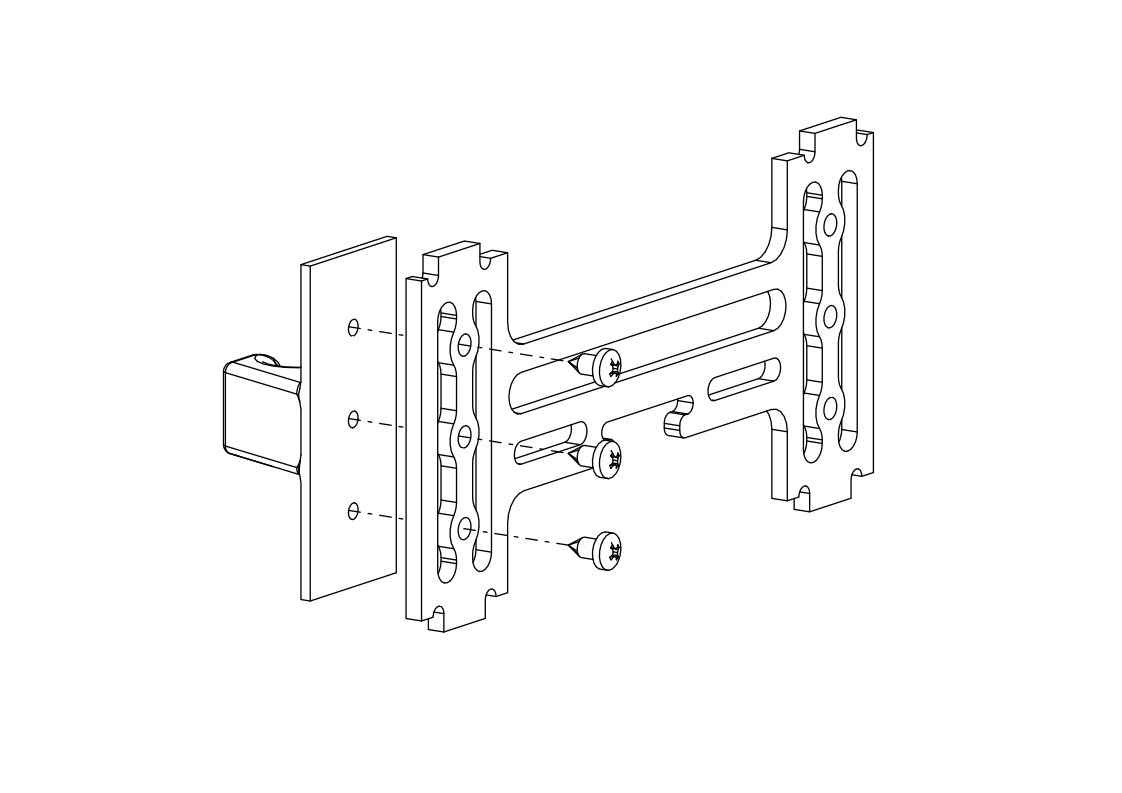
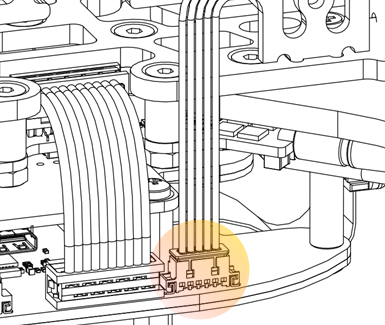
Подключите кабельную сборку питания в модуль автопилота, а внешний
разъем питания закрепите винтами M2.5x6. Не забудьте обернуть угловой
разъем выделенный на рисунке вокруг стойки.
Шаг 6
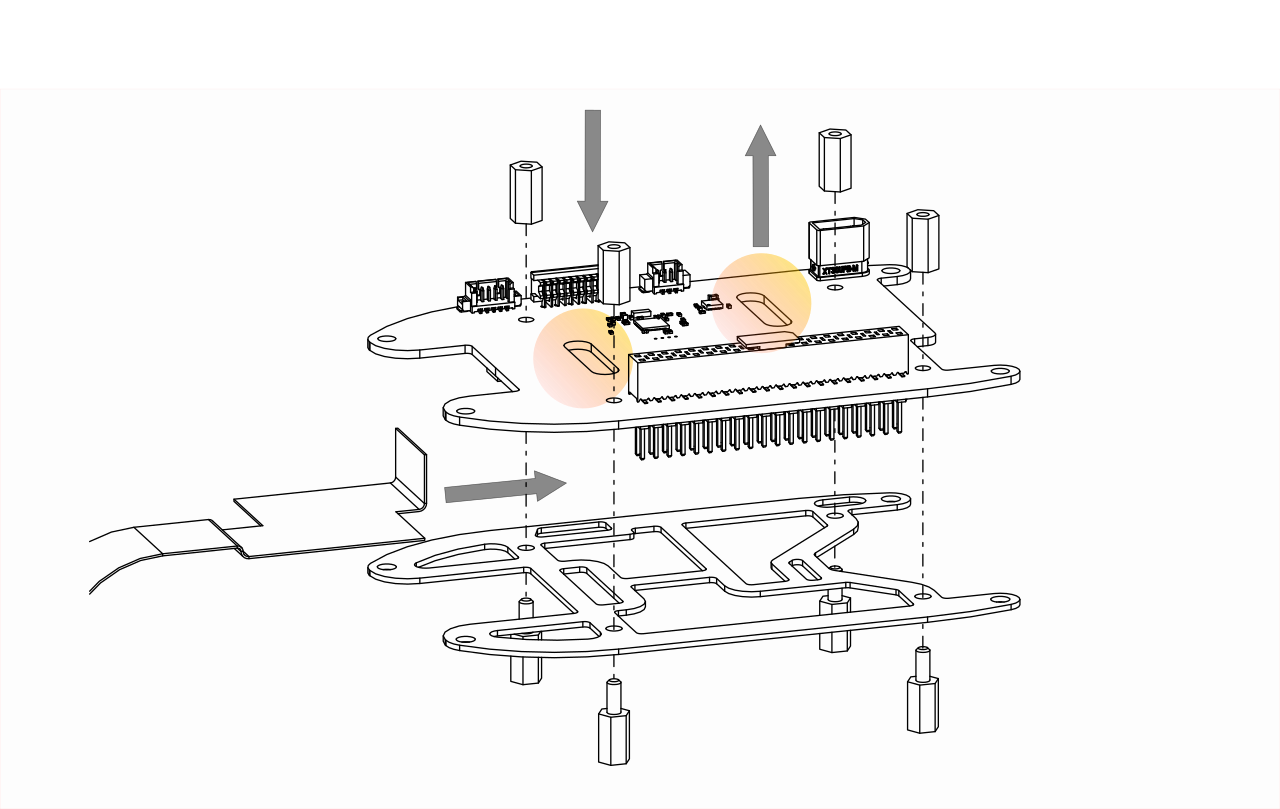
Используются: стойка с внешней резьбой – 4 шт., стойка с внутренней
резьбой – 4 шт., шлейф Raspberry Camera – 1 шт., плата распределения
питания – 1 шт., нижняя пластина – 1 шт.¶
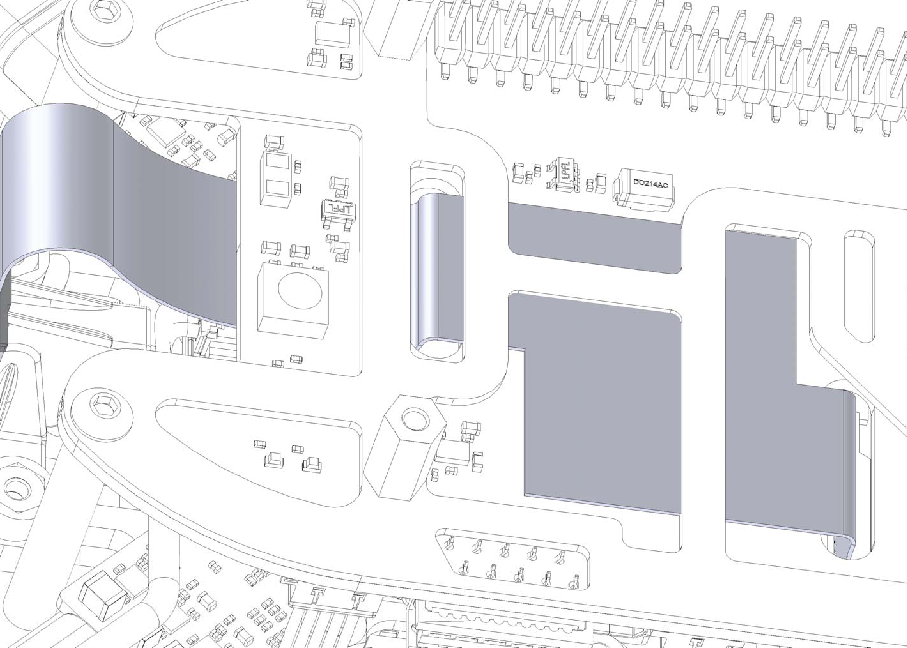
Проложите шлейф, подключенный к камере Raspberry Camera между пластиной
и платой распределения питания. Обратите внимание на второй рисунок.
После чего соедините всё стойками, как показано на рисунке. Не пережмите
шлейф на линиях сгиба.
Внимание
Внимание в зависимости от конкретной поставки, стойки у вас могут быть заменены на винты M2.5 в этом шаге.
Подсказка
При необходимости вы можете напечатать стойки с внутренней резьбой. Модель можно найти в архиве с элементами конструкции Пионер Макс:
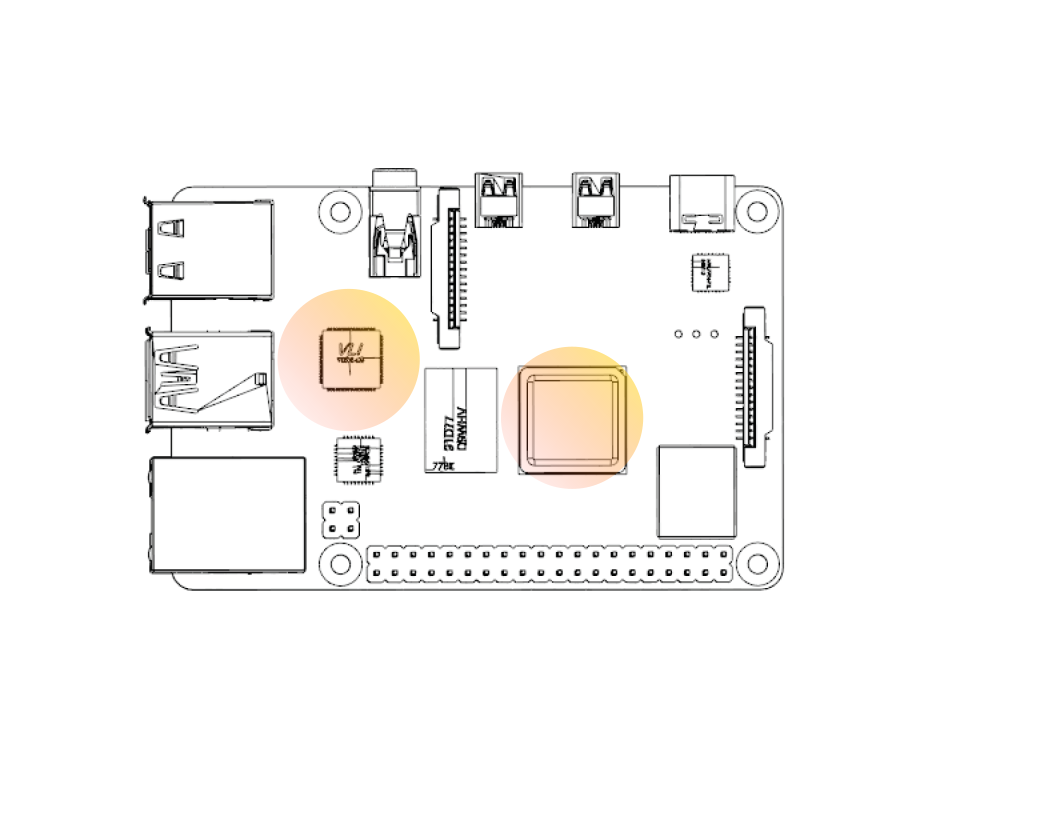
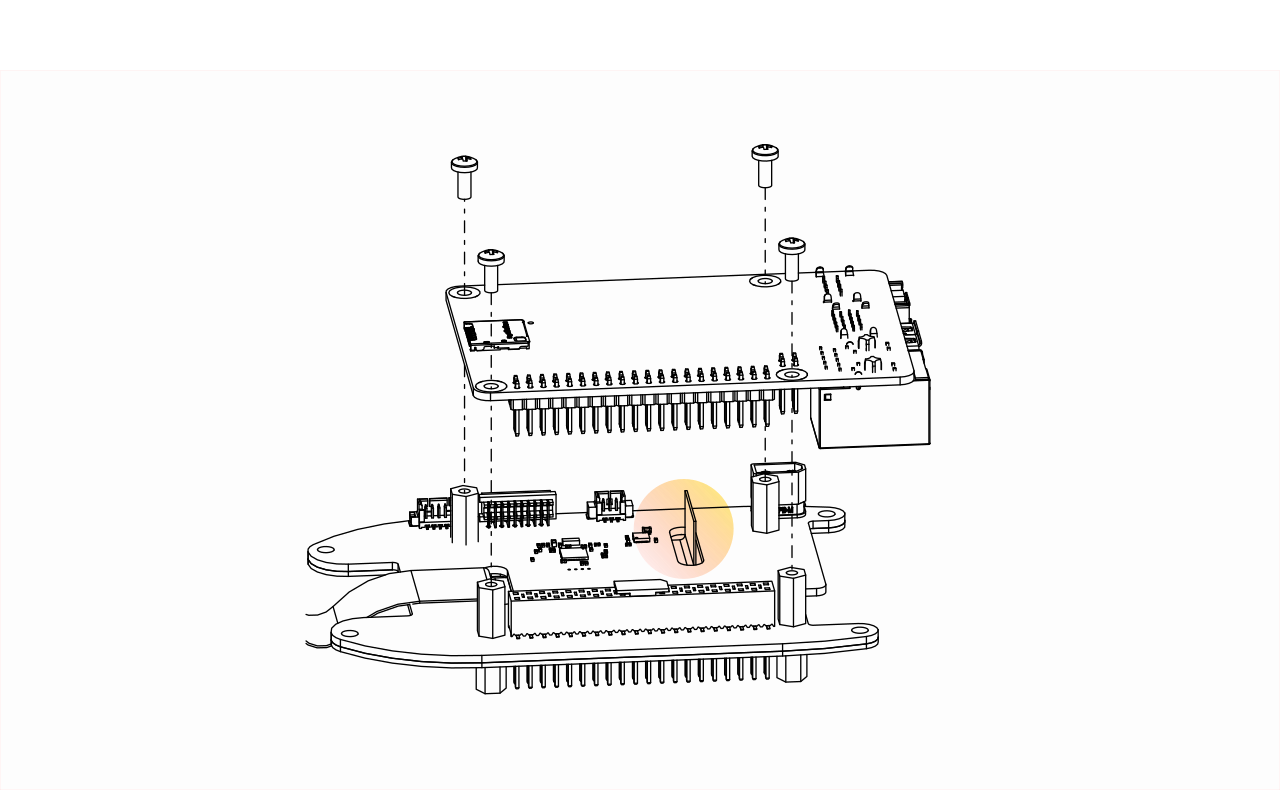
С помощью четырех винтов M2.5x6 закрепите одноплатный компьютер
Raspberry Pi 4, не забудьте перед этим подключить шлейф камеры в разъем
Raspberry Pi 4.
Шаг 8
Установите приемник в разъем на плате автопилота, обратите на
область, выделенной цветом. Закрепите приемник на луче на стяжку, обратите внимание, что кнопка должна смотреть от
луча, чтобы к ней был доступ для нажатия, это понадобиться позднее.
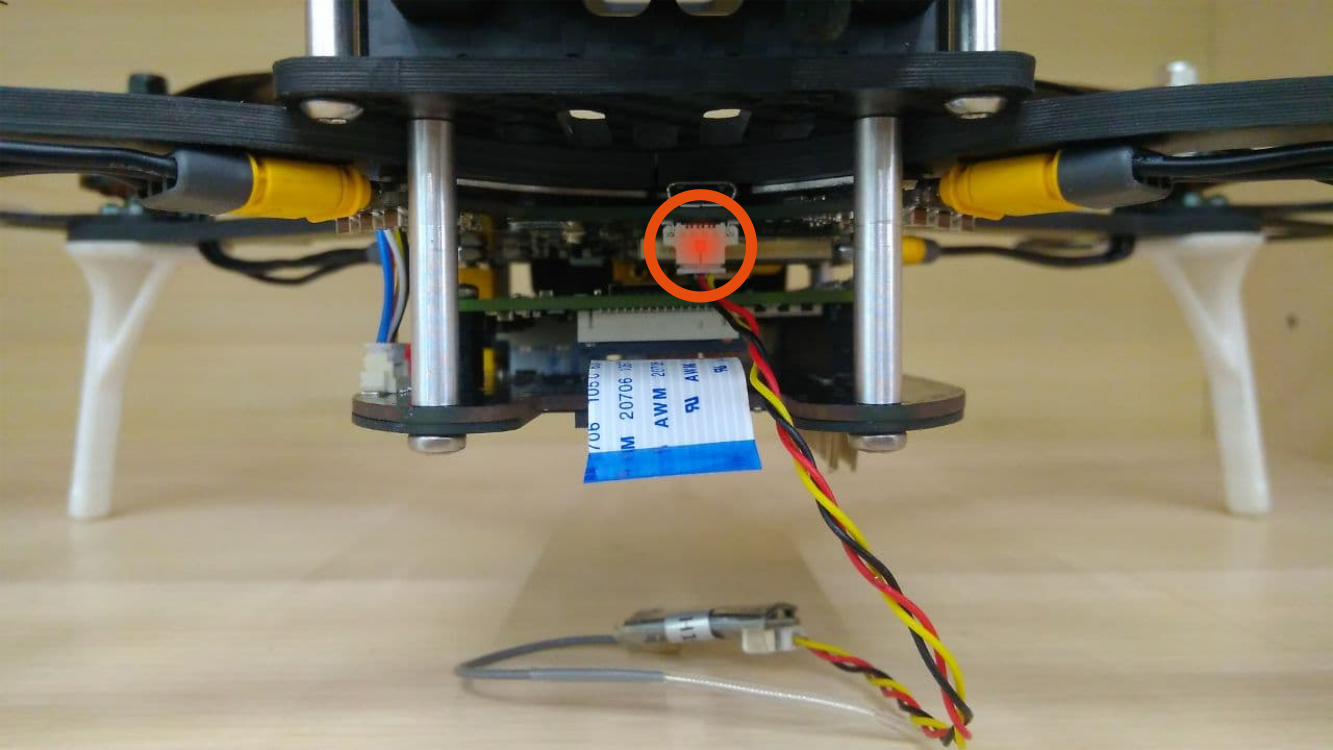
Совет
Приемник надо присоеденить к базовой плате автопилота, обратите внимание на фотографию ниже.
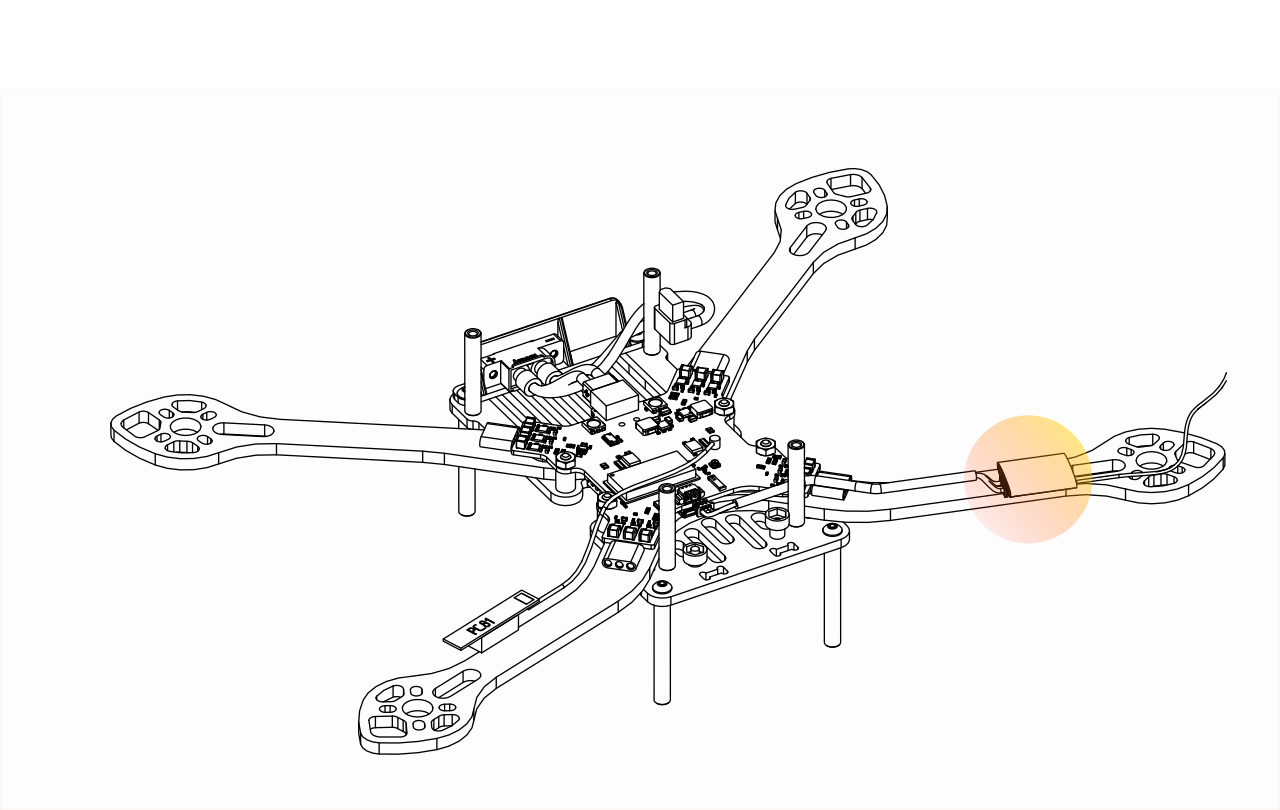
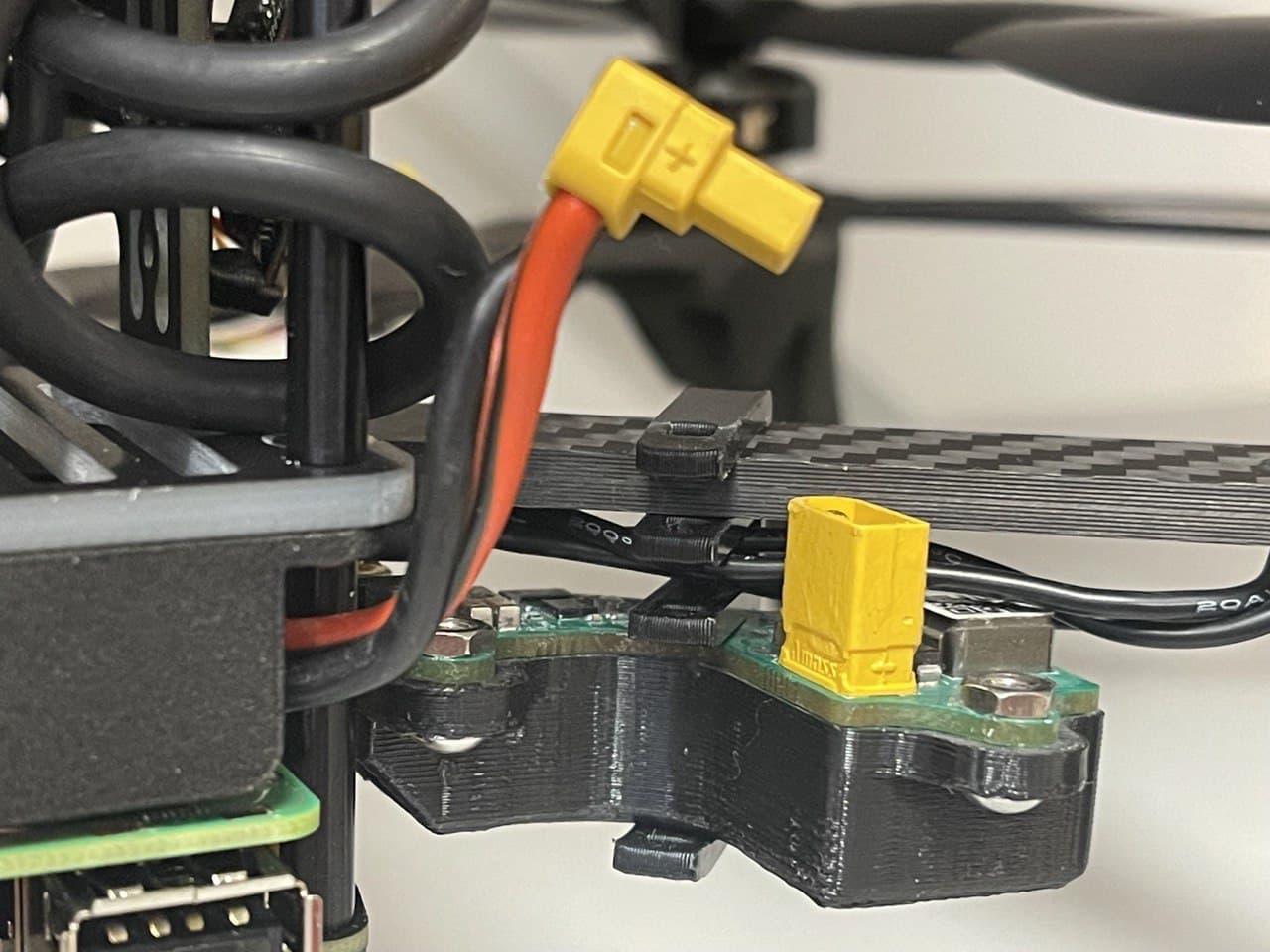
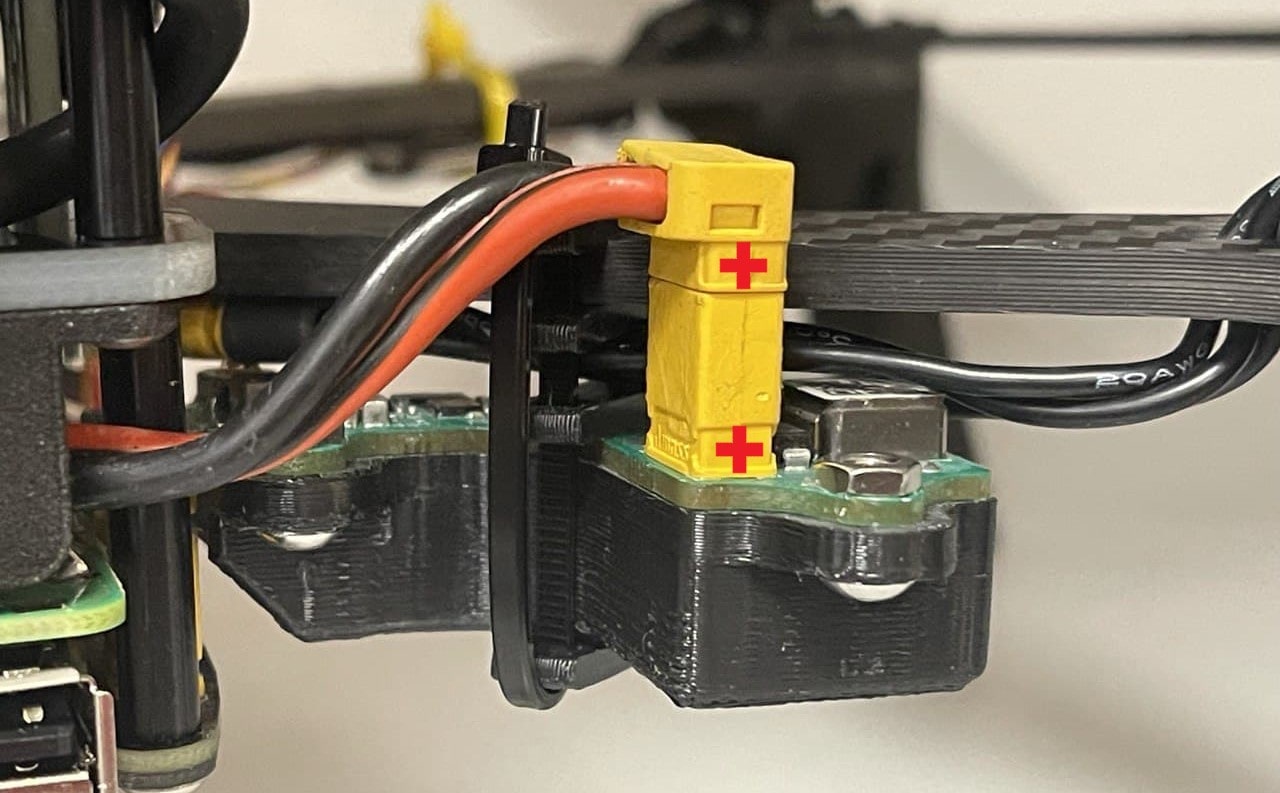
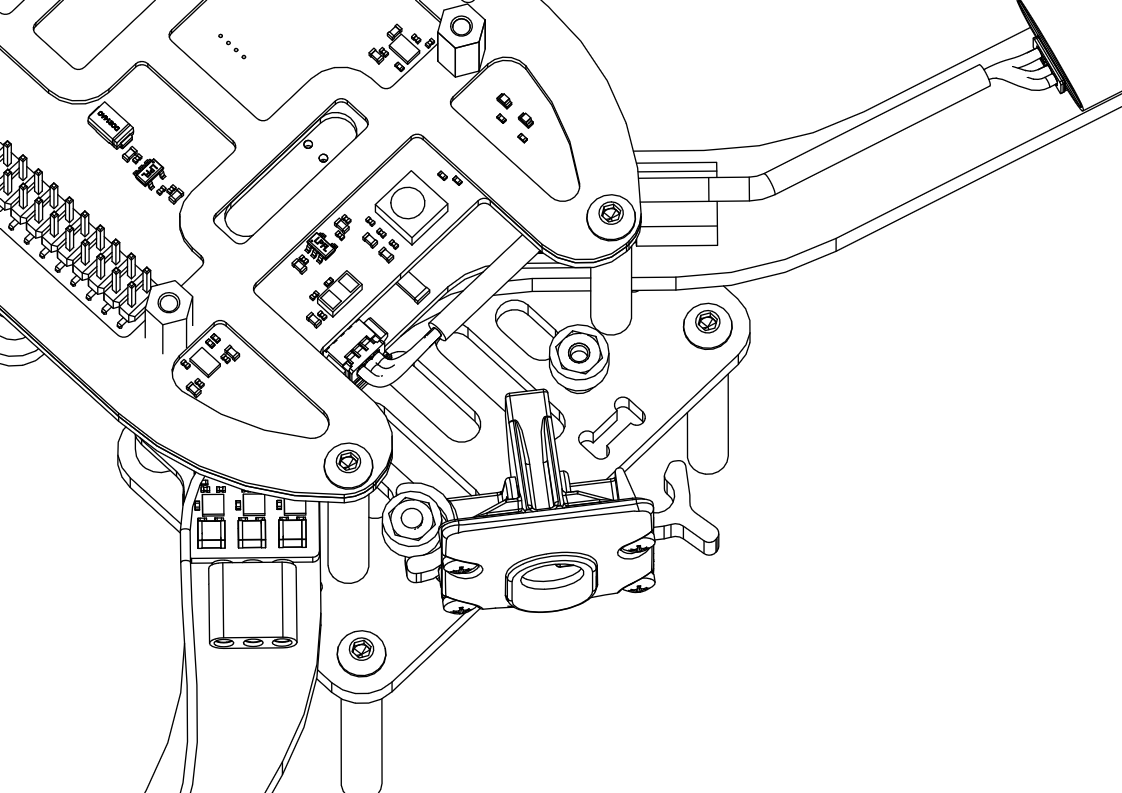
Пункт 2. Расположите модуль распределения питания как показано на изображении, подключив разъём XT30 в ответную часть.
Пункт 3. Используйте фиксатор для крепежа модуля на луче следующим образом. Первый паз фиксируется на луче коптера. Во второй паз укладываются провода от мотора. Третий паз - поддерживает сам модуль. Дополнительно, обратите внимание, что силовой кабель должен распологаться перед стойкой!
Пункт 4. Зафиксируете всю конструкцию с помощью кабельной стяжки продев её во все отверстия. Подключите кабель питания в соответствующий разъём.
Будьте внимательны при подключении кабеля питания к плате распределения. Соблюдайте полярность подключения, во избежание возгорания.
Шаг 10
Используются: крышка Raspberry Camera - 1 шт., Raspberry Camera - 1 шт.,
кронштейн Raspberry Camera – 1 шт., шуруп DIN7049-ST 2.2x4.5 – 4 шт.¶
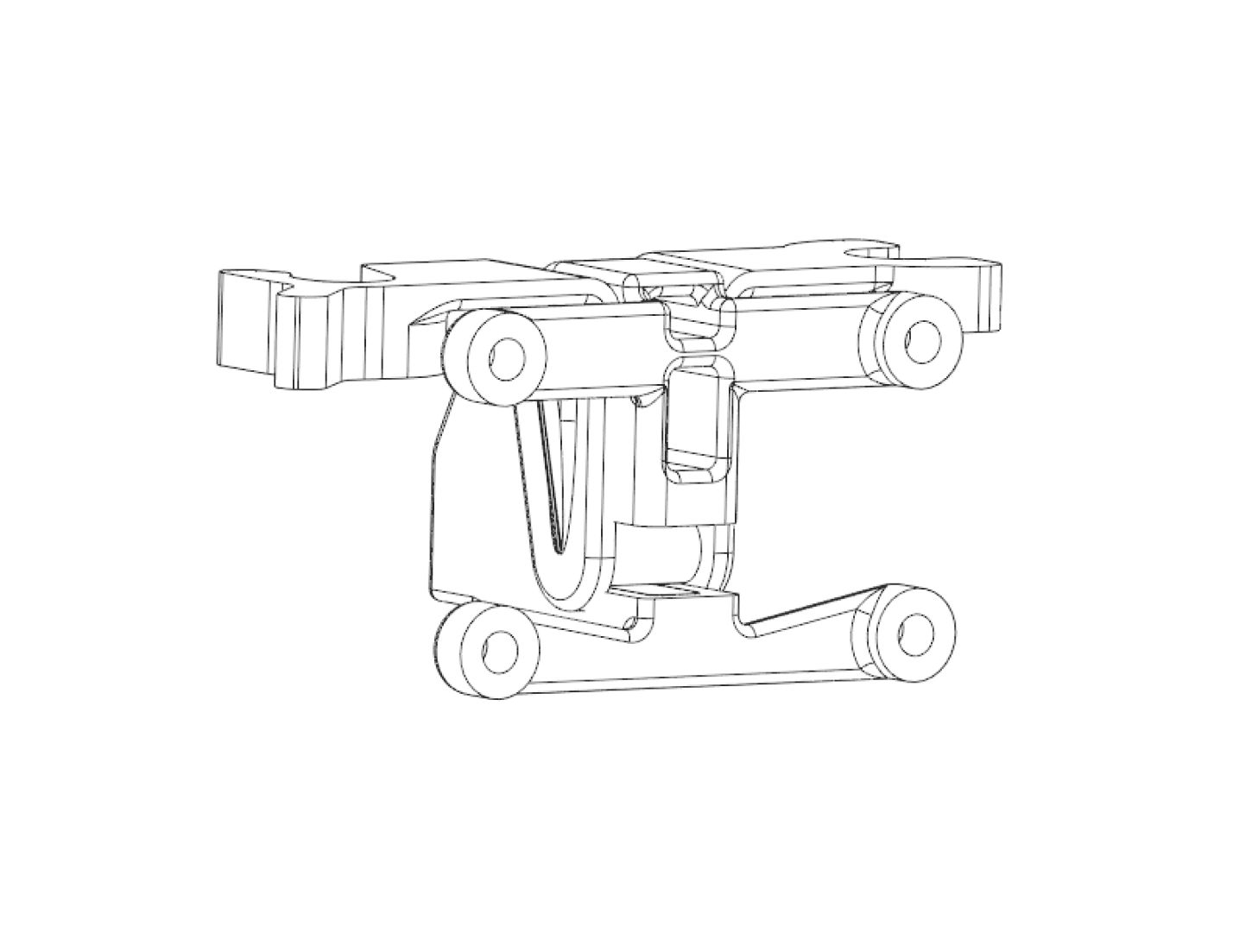
Сначала соберите кронштейн камеры, как показано на первом рисунке. После
чего закрепите крышку на камере с помощью 4 шурупов, как показано на
рисунке. Подключите шлейф, идущий от Raspberry Pi к камере.
Внимание, в зависимости от конкретной поставки, кронштейн камеры может
отличаться, чтобы посмотреть, как установить другой кронштейн перейдите
по ссылке: Установка старого кроншейна Raspberry Camera
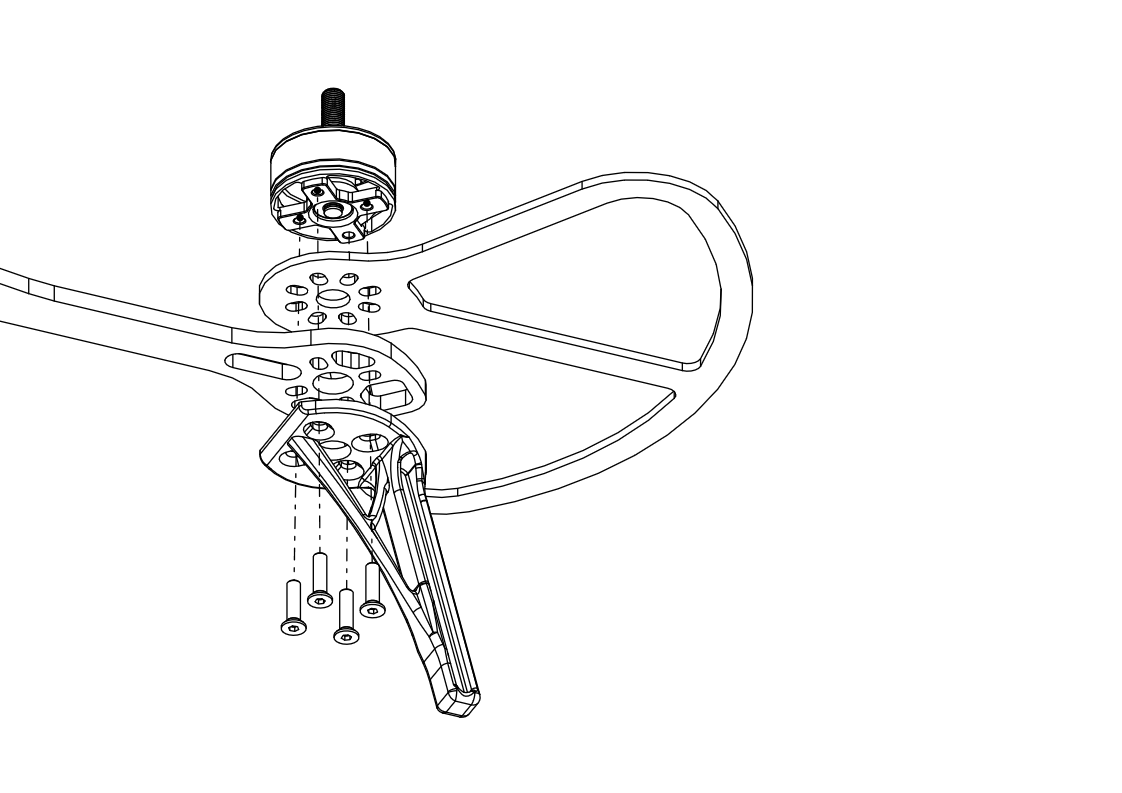
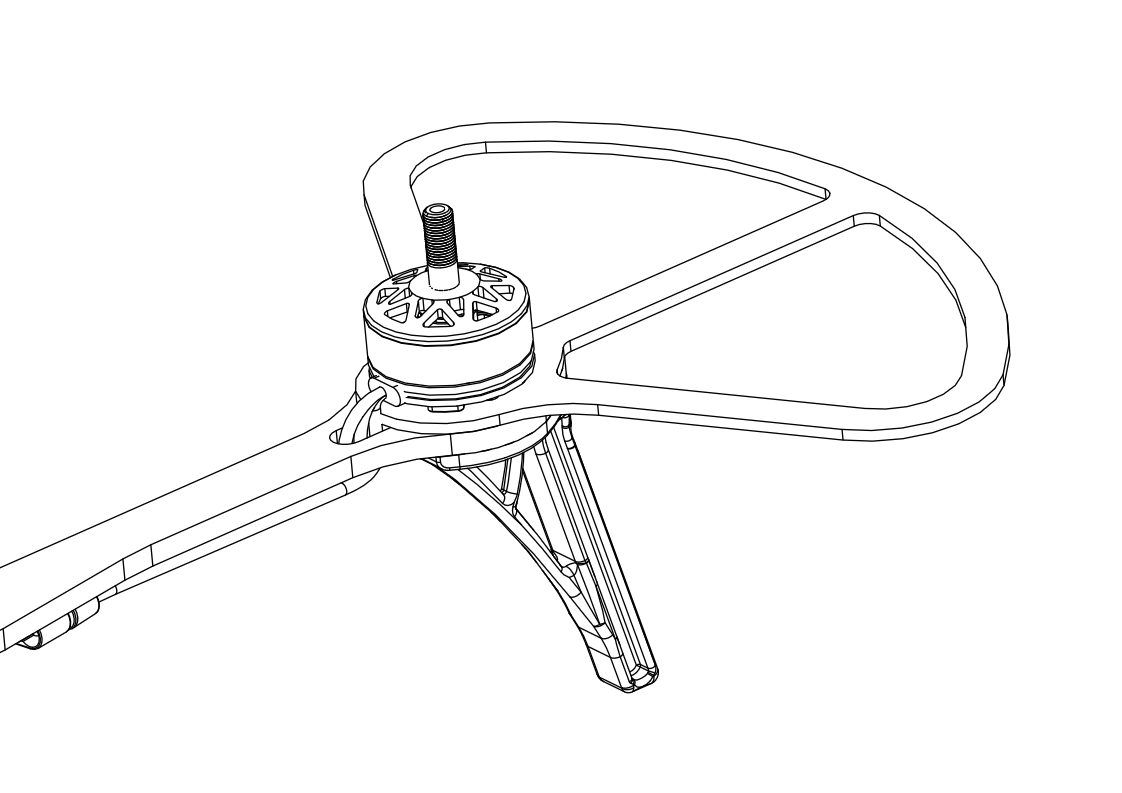
Перед установкой двигателей не забудьте продеть разъем мотора через
специальное отверстие в луче. После чего закрепите защиту, моторы и
опоры винтами M3x12 на луче, как показано на рисунке. Обратите внимание
на цветовую маркировку гаек двигателя, они могу быть серебристого или
черного цветов, сверьтесь с правильным расположением двигателей на
рисунке выше.
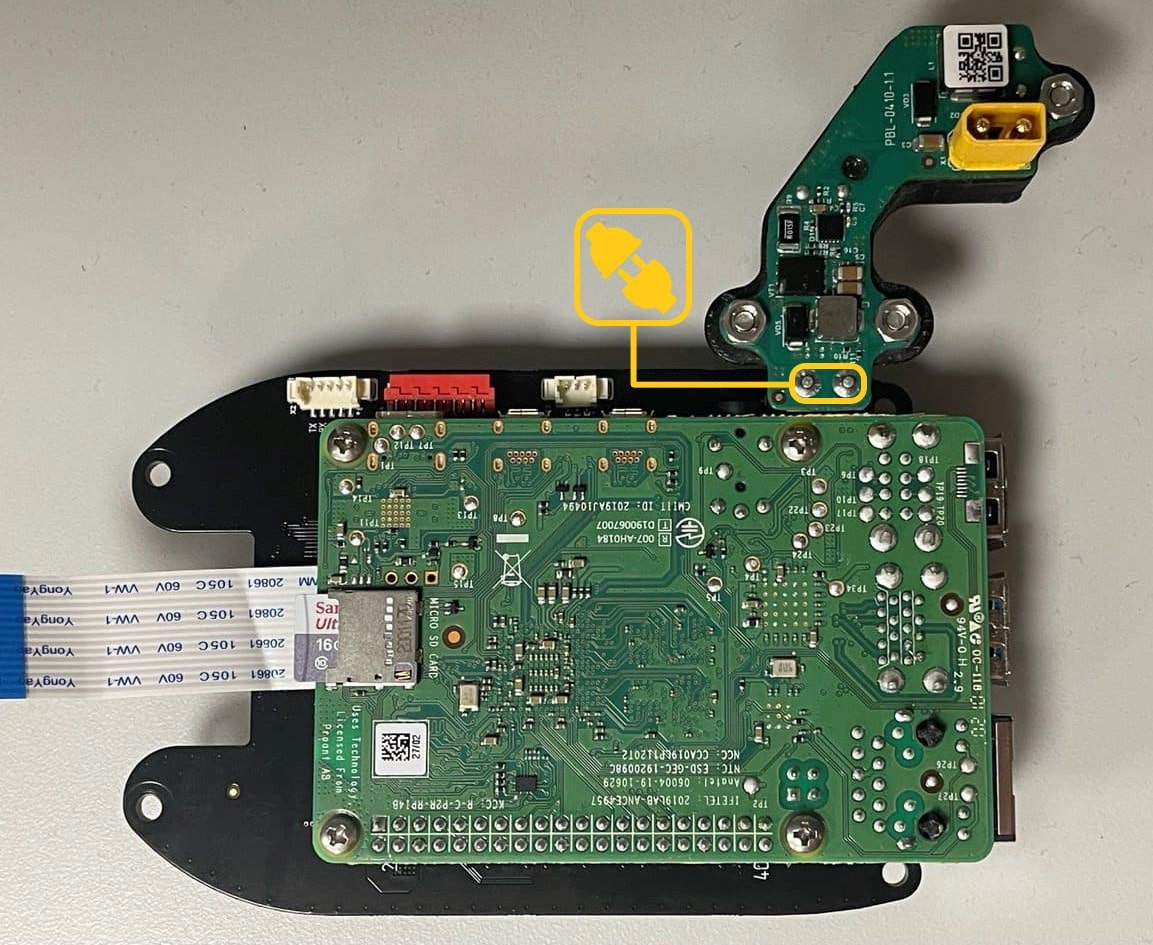
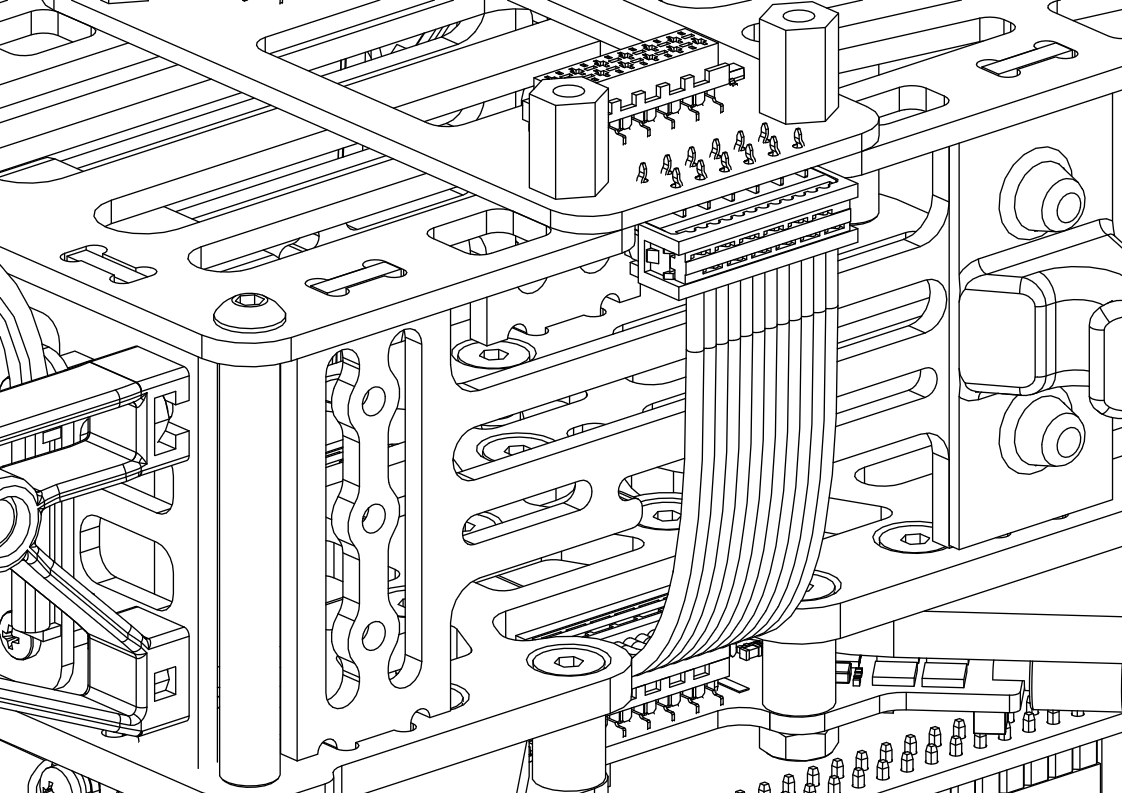
Подключите кабель, выделенный на рисунке к плате автопилота и к
плате-адаптеру.
Шаг 19
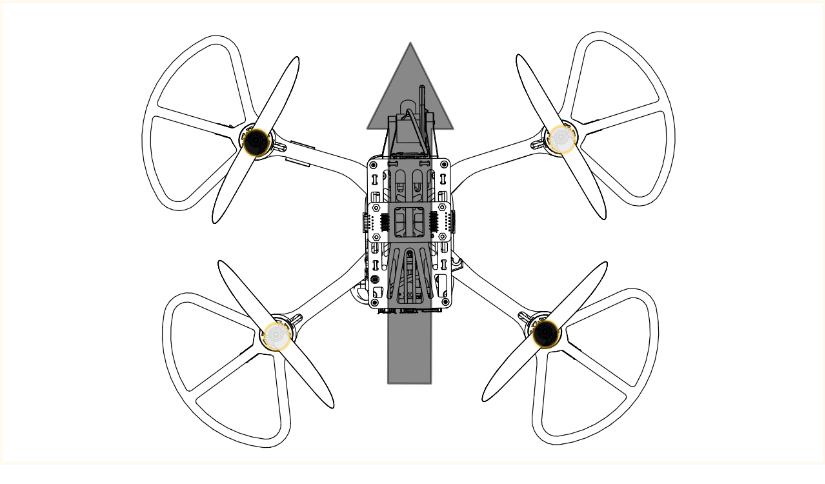
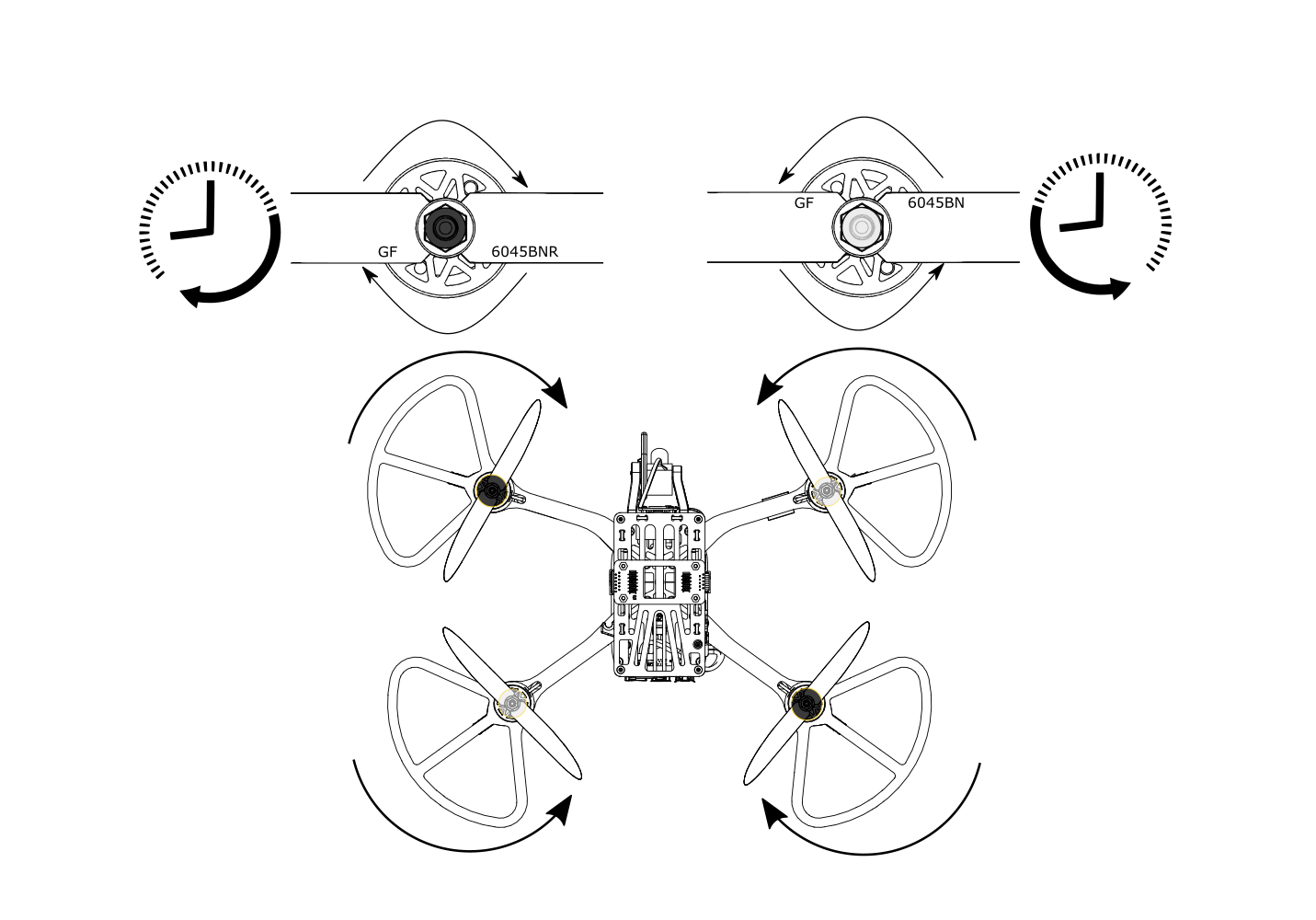
Используются: собранный квадрокоптер, винт воздушный левого вращения
6045BN - 2 шт., винт воздушный правого вращения 6045BNR - 2 шт.¶
Обратите внимание: черные гайки имеют левую резьбу! Надписи на винтах
(6045BN или 6045BNR) обозначают направление вращения, установите винты
согласно рисунку. Открутите гайки с осей моторов, установите воздушные
винты (надписи на винтах должны быть сверху) и закрепите их гайками.
Серебристые гайки закручиваются по часовой стрелке (правая резьба),
черные гайки – против часовой стрелки (левая резьба). Важно убедиться в
том, что вы прочно зафиксировали воздушные винты, проверять это лучше
перед каждым полетом.
В зависимости от вашей комплектации вы можете подключить дополнительный
модуль навигации, например, модуль GPS/ГЛОНАСС для автономного полета на
улице, или ИК-модуль навигации для полета в помещениях (требуется HTC
LightHouse v2). Перед полетом не забудьте поменять параметры автопилота,
чтобы он использовал правильную систему навигации.
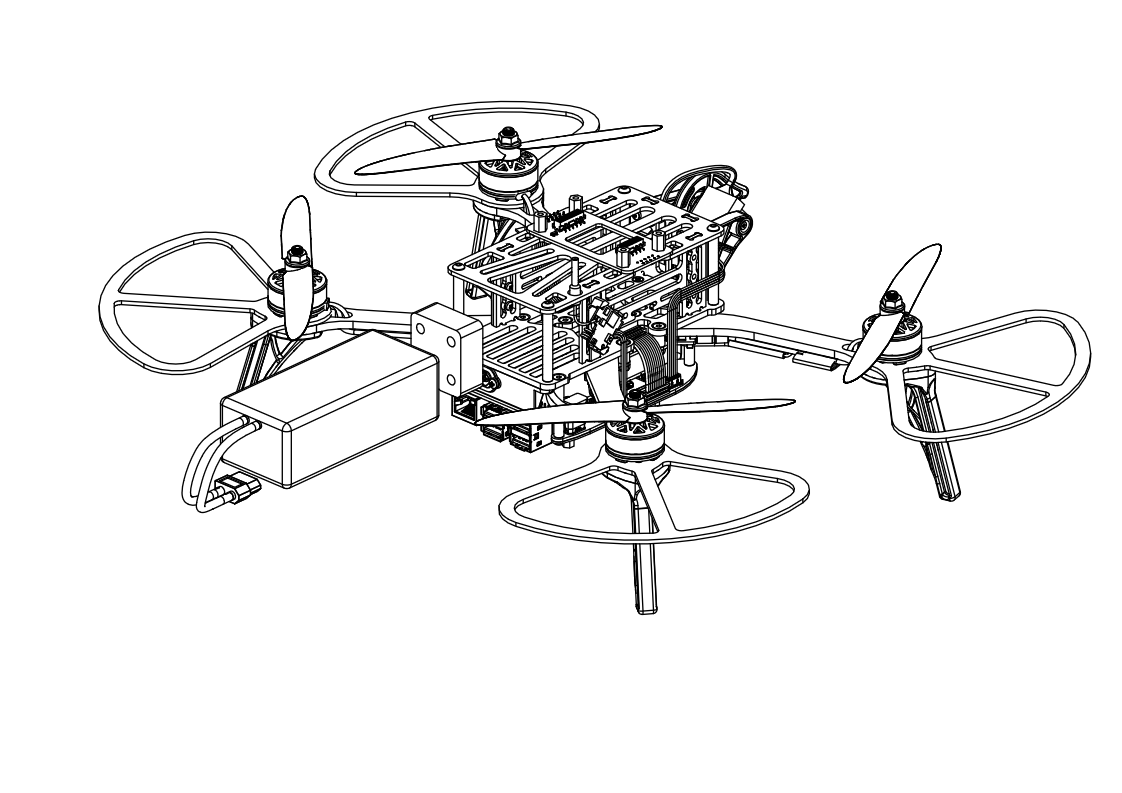
Приклейте проставку АКБ на аккумулятор после чего установите аккумулятор
и закрепите его с помощью резинки сзади, сделав петлю вокруг правой
стойки и закрепив на фиксаторе на боковой стенке.
Предупреждение
Перед началом полетов, пожалуйста ознакомьтесь со всей инструкцией. Вам обязательно необходимо будет обновить автопилот и параметры к нему.