Cистема беспроводной зарядки для Пионера Мини¶
Участники проекта¶
Команда: Павлодарский высший колледж управления.
- Участники:
- Розанов Сергей Николаевич
- Солдатов Данил Владиславович.
Проектный наставник: Смирнов Евгений Александрович.
Описание и цель проекта¶
Дроны, использующиеся для переноски грузов, картографии и обследования местности с высоты, имеют ограниченный запас батареи и дальность полета. Так, например, Геоскан Пионер может пролететь 500 м и находиться в полете 17 мин. Оператор, управляющий дроном, должен заботиться о том, чтобы успеть привести его на базу до того момента как его батарея разрядится, ведь дрон может упасть в воду или на людей.
Команда из Павлодарского колледжа управления предлагает разместить по маршруту следования дрона станции для беспроводной зарядки на возвышенных местах, например, на опорах ЛЭП. При разряде батареи дрон с помощью компьютерного зрения распознает зарядную площадку и приземлится на неё, а после заряда батареи продолжит свой полет.
Решаемые задачи¶
Создание прототипа беспроводной зарядки для Пионера Мини
Этапы разработки¶
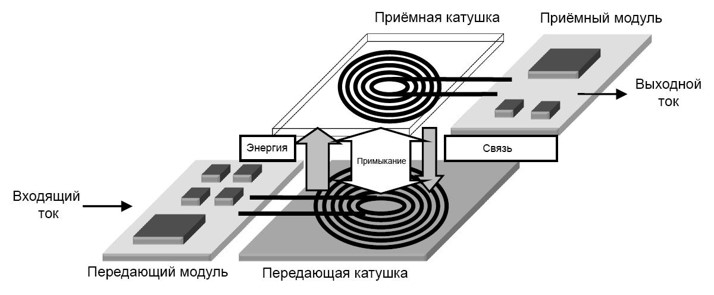
Технология беспроводной передачи электричества основана на магнетизме и электромагнетизме. Для этого необходимы передатчик и приемник индуктивного тока в виде катушек, генерирующих вместе переменное магнитное поле непостоянного тока.
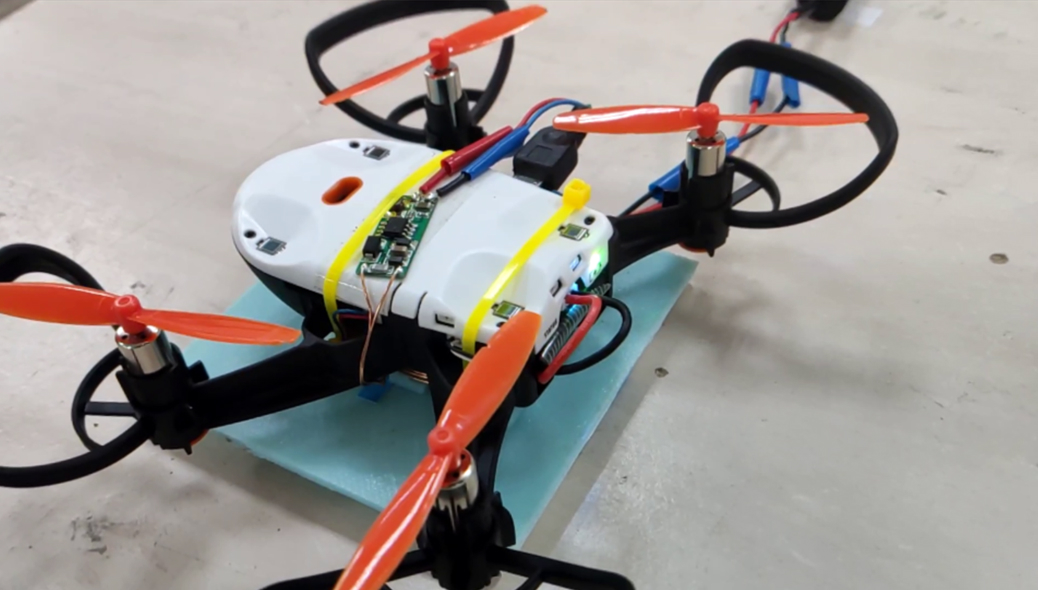
Команда изготовила на 3D-принтере посадочную площадку для дрона с закреплённым на ней передатчиком индуктивного тока. Он подключен к электрической сети 220В с помощью блока питания на 12В.

На корпусе дрона с помощью 3D-детали закрепили приемник индуктивного тока, подключенный к разъему USB для зарядки аккумулятора дрона.
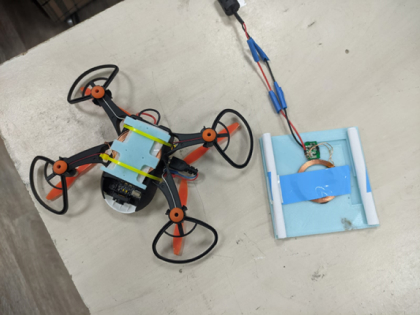
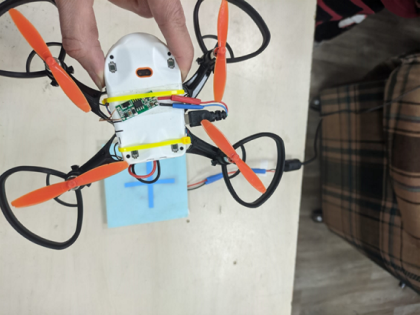

Измерили параметры и проверили работу зарядки. Толщина посадочной площадки зарядки — 3 мм, толщина крепежной детали на корпусе дрона — 2,5 мм. Когда дрон садится на посадочную площадку, расстояние между передатчиком и приемником тока составляет 5,5 мм. При этом будет индуцироваться ток 240-310 мА. Чтобы полностью зарядить аккумулятор дрона емкостью 1100 мА/ч, понадобится 3,5 часа.
Результат¶
В результате работы был создан рабочий прототип беспроводного зарядного устройства. Ближайшее развитие проекта – добиться, чтобы дрон самостоятельно распознавал посадочную площадку для беспроводной зарядки с помощью компьютерного зрения и специальной метки.



Если дрон выполняет автономный полет без участия оператора, требуется программно анализировать уровень заряда батареи: если напряжение аккумулятора дрона опустилось до 3В, нужно двигаться на станцию беспроводной зарядки, если аккумулятор полностью заряжен — продолжать полет.
Материалы проекта¶
Презентация: Cистема беспроводной зарядки для Пионера Мини