Сиcтема оптической навигации¶
Система оптической навигации (OPT) - позволяет квадрокоптеру определять свое положение, используя датчик оптического отслеживания движения, который регистрирует смещение объектов. Модуль дает возможность модели удерживать положение при положении стиков в центре и летать в автоматическом режиме.
Ранее система была представлена в виде внешнего дополнительного модуля оптического позиционирования. После обновления система была интегрирована в плату подключения дополнительных модулей.
Для того чтобы дрон мог стабильно летать над поверхностью, используя оптический поток, эта поверхность должна удовлетворять определённым требованиям:
Требования к поверхности:
Поверхность должна иметь текстуру и достаточный уровень контраста, чтобы алгоритмы оптического потока могли эффективно отслеживать движение отдельных точек.
Поверхность должна быть достаточно освещена. Слабая освещенность или перепады освещения могут затруднить анализ изображений.
Разнообразие в цвете и узорах помогает системе оптического потока лучше идентифицировать и отслеживать движение.
Наличие четких границ и контуров на поверхности помогает улучшить точность отслеживания оптического потока.
Поверхность должна быть свободна от движущихся объектов, которые могут сбивать с толку систему оптического потока.
Примеры подходящих и неподходящих поверхностей:
Важно
Соблюдение этих требований помогает обеспечить стабильную работу системы оптического потока, что, в свою очередь, улучшает стабильность и точность полета дрона.
Подходящие поверхности:
Неподходящие поверхности:
Индикация
Одновременно горят Красный и Зёлёный светодиоды - плата находиться в режиме загрузчика;
Моргает Зёлёный светодиод - штатный режим работа + индикация дальности (Чем чаще - тем больше расстояние и наоборот);
Моргает Красный светодиод - качество данных с оптического потока ниже требуемого / скорость полёта выше предельно допустимой;
Постоянно горит Зёлёный светодиод - расстояние за пределами диапазона работы дальномера, теперь для определения высоты полётный контроллер используется барометр;
Индикация отсутствует - проблемы с подключением или неисправность модуля.
Важная информация по режиму навигации!
Подсказка
Эти меры помогут обеспечить безопасную эксплуатацию квадрокоптера и минимизировать риски в случае непредвиденных ситуаций.
Система навигации, которую будет использовать Пионер в полёте, должна быть предварительно выбрана в PioneerStation (LPS / OPT / GPS)
Тумблер SWB должен находиться в центральном положении для активации режима полёта с использованием системы навигации.
Для подстраховки используйте режим удержания высоты (тумблер SwC в центральном положении). Это позволит исключить резкое падение при отключении режима навигации или её некорректной работе.
В экстренных ситуациях
Если дрон начинает некорректно работать по оптическому потоку, немедленно переключите тумблер SwB в верхнее положение. Это отключит режим навигации и включит ручной режим. Поскольку тумблер SwC находится в центральном положении, автоматически включится режим AltHold (удержание высоты по лазерному дальномеру или барометру).
Если в режиме AltHold дрон продолжает набирать высоту (например, дальномер перекрыт грузом), переключите тумблер SwC в верхнее положение для перехода в режим управления stabilize (В этом режиме пилот отвечает за управление мощностью двигателя и углами наклона дрона, но электронная система стабилизации помогает удерживать дрон горизонтально)
Используйте пульт управления, чтобы аккуратно посадить дрон вручную
Прошивка платы расширения¶
Для обновления прошивки платы расширения выполните следующие действия:
Скачайте актуальную прошивку для модуля расширения по ссылке - Module Optical Flow 1.25.
Загрузите плату расширения в режиме «бутлоадера». Для этого модуль должен быть установлен на пионер и подключён к плате автопилота с помощью шлейфов, идущих в комплетке.
Удерживая нажатой кнопку «Старт» на базовой плате, подключите её с помощью USB-кабеля к ПК. При этом зелёный и красный светодиоды, расположенные на плате расширения, будут гореть постоянно как и все светодиоды на плате автопилота. (Обе платы перейдут в режим прошивки).
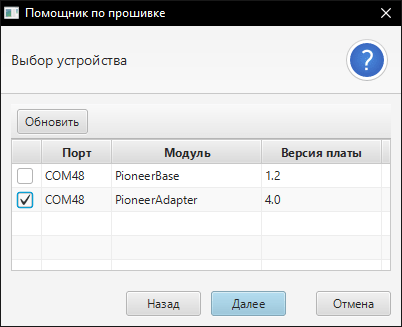
В PioneerStation перейдите в раздел обновления прошивки и выберите устройство PioneerAdapter. Нажмите «Далее»
В качестве источника, выберите вариант обновления «Из файла» и укажите путь к ранее скачанному файлу. Нажмите «Прошить» и дождитесь окончания прошивки.
Ошибка
Важно! Данное объявление актуально только для пользователей плат версии 1.6.3.
Если при обновлении прошивки модуль PioneerAdapter не отображается в списке доступных устройств, необходимо обновить загрузчик платы. Подробная инструкция доступна по ссылке: Обновление загрузчика АП 1.6.3 (PDF)