ROS-система в WebMenu¶
ROS-система это операционная система для программирования роботов и роботизированных устройств. Подробнее
Пункт ROS в WebMenu отвечает за управление ROS-системой.
Управление ROS¶

- Кнопка Включить ядро ROS аналогична команде roscore в терминале
Запускает только ядро ROS и ничего больше
- Кнопка Включить ROS систему аналогична команде rospioneer start в терминале
Запускает ROS систему (ядро ROS + необходимые для работы Пионер Макс ноды, подключается к базовой плате Пионер)
Если ROS уже запущен, то кнопки заменяются на выключение ROS ядра и системы, по нажатию, как ни странно, выключают.
Совет
Запуск ROS системы из WebMenu не позволит увидеть отладочную информацию в консоли, для удобства отладки рекомендуем использовать rospioneer start на стадии написания кода
Список узлов¶
Аналог команды rosnode list в терминале

Позволяет увидеть все запущенные ноды в текущей ROS системе.
Список сервисов¶
Аналог команды rosservice list в терминале
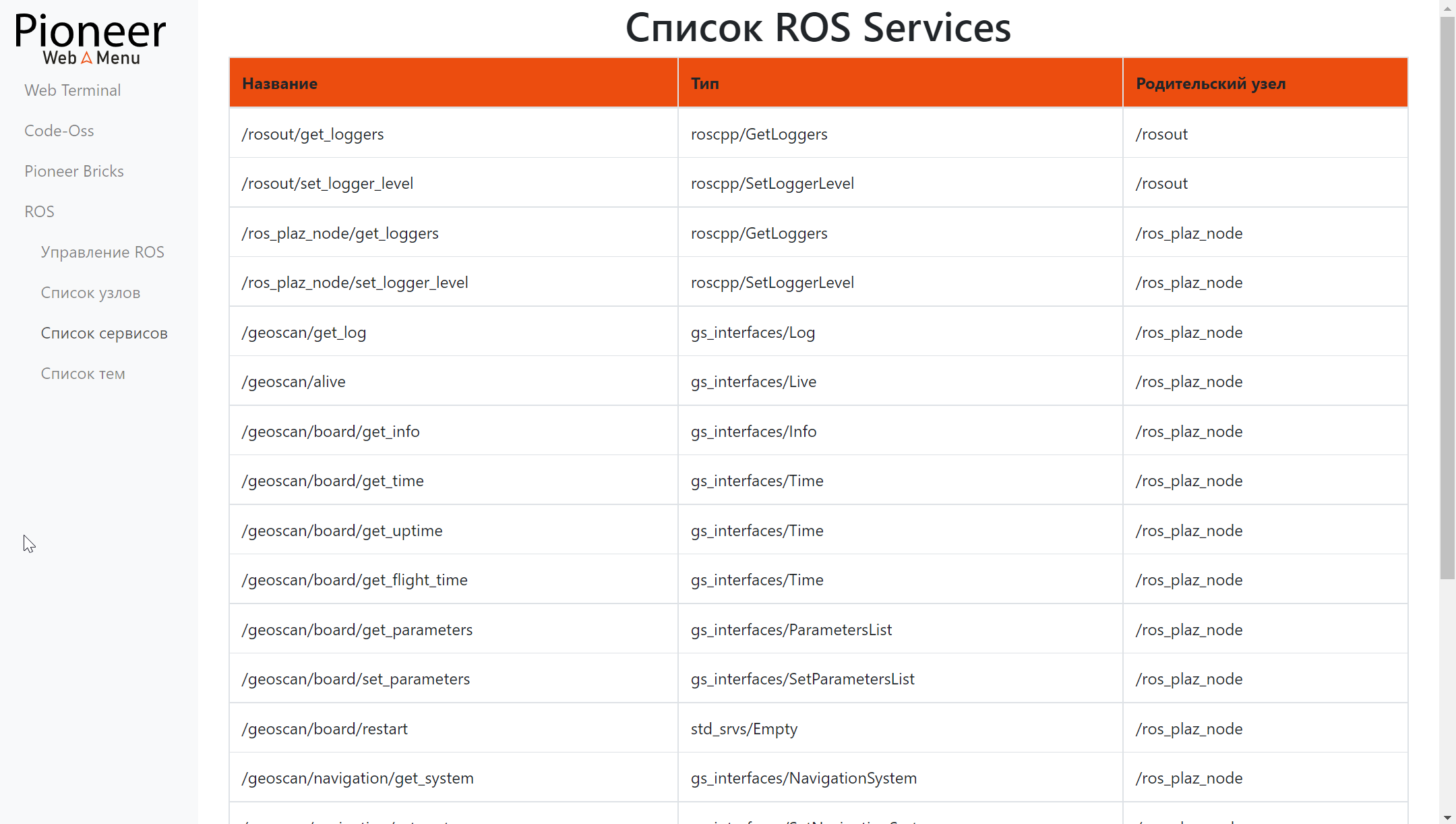
Позволяет увидеть все запущенные сервисы в текущей ROS системе
Список тем¶
Аналог команды rostopic list в терминале
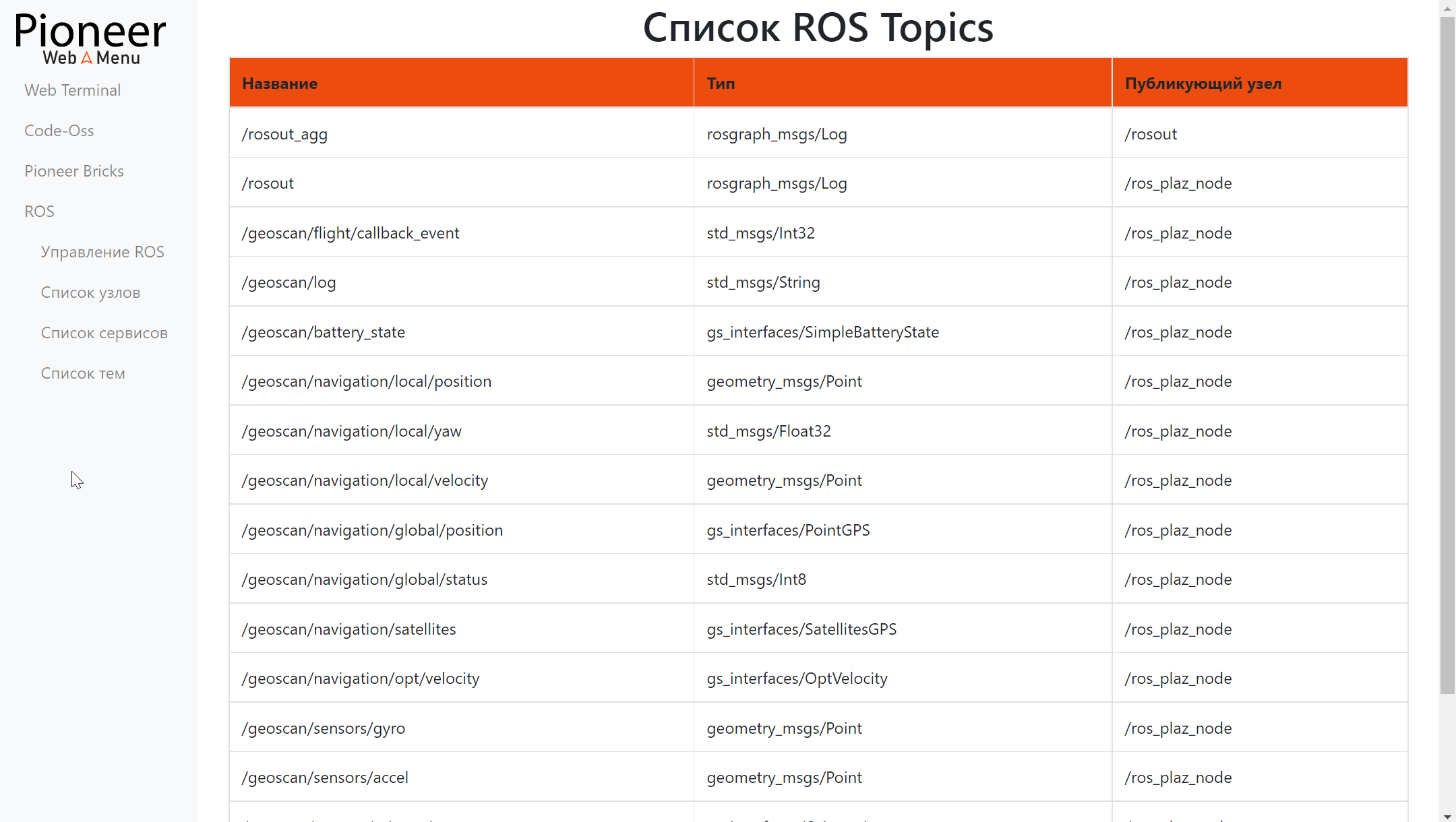
Позволяет увидеть все созданные топики в текущей ROS системе
Внимание
Списки отображаются только после включения ROS ядра