Система УЗ навигации - Геоскан Локус¶
Система позволяет создать контролируемую полетную зону с максимальным размером 10х10х4 метров. Она обеспечивает точное и безопасное управление квадрокоптером независимо от других систем навигации (GPS/ГЛОНАСС)
Подсказка
В настоящем разделе описывается сборка и настройка ранней версии системы Геоскан Локус (1.0). По ссылкам ниже Вы можете скачать инструкции в формате .pdf как для ранней, так и для обновленной версий системы (2.0).
Комплект системы¶
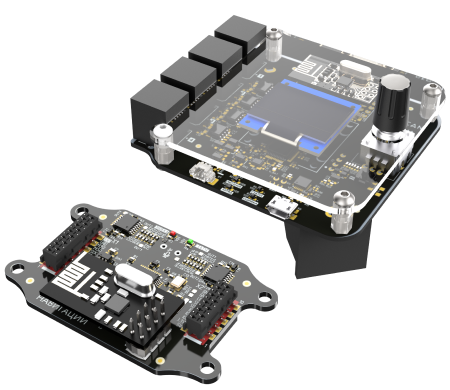
Блок управления;
4 ультразвуковых излучателя;
Провода для подключения излучателей;
Приложение Geoscan-LPS для синхронизации с компьютером (скачать последнюю версию). В случае если программа закрывается с ошибкой - установите на вашу ОС среду выполнения Java (скачать для Windows).
LiPo-аккумулятор 18650 для блока управления.
Комплект крепежа для БВП.
Блок управления;
Блок питания;
Антенна;
4 ультразвуковых излучателя;
Провода для подключения излучателей;
Комплект крепежа для БВП.
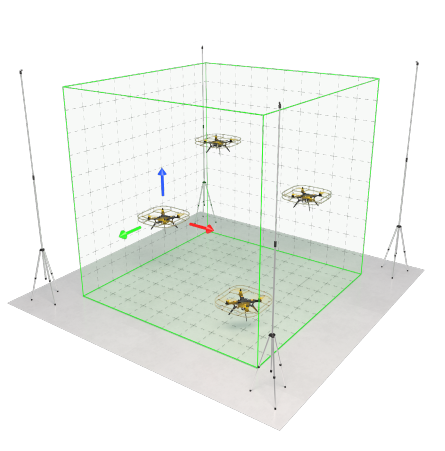
Установка полетной зоны¶
Установите ультразвуковые излучатели в будущей зоне полета. Расположите их в вершинах полетной зоны так, чтобы они были направлены к ее центру. При этом:
минимальная высота установки излучателей - 2 м
минимальная дистанция между излучателями - 3 м
Примечание
Система будет работать точнее, если на полу в помещении будет мягкое покрытие (ковер, ковролин).
Проводами соедините каждый излучатель с блоком управления. Следите, чтобы не перепутать провода и разъемы, они подписаны. Блок управления лучше расположить за пределами полетной зоны. Его можно подключить к ноутбуку или компьютеру через порт USB. Блок управления и бортовой модуль общаются по радиоканалу.
Рулеткой или дальномером измерьте расстояния между излучателями и высоту их установки. Удобнее всего задавать полетную зону в форме квадрата или прямоугольника. По результатам измерений формируется координатная сетка полетной зоны.
Блок управления и его настройка¶
Примечание
Для работы системы подключение к компьютеру необязательно. Достаточно включить блок управления и расположить «Пионер» с установенным бортовым модулем в пределах полетной зоны.
В зависимости от ревизии блока управления - настройка и конфигурирование УЗСН происходит различными способами. В то время как блок управления ревизии 1.0 настраивается через приложение Geoscan LPS либо вручную(с помощью элементов управления на блоке), то блок ревизии 2.0 настраивается исключительно через веб-интерфейс.
На рисунке показан интерфейс программы LPS, которая используется для настройки и работы с системой позиционирования.
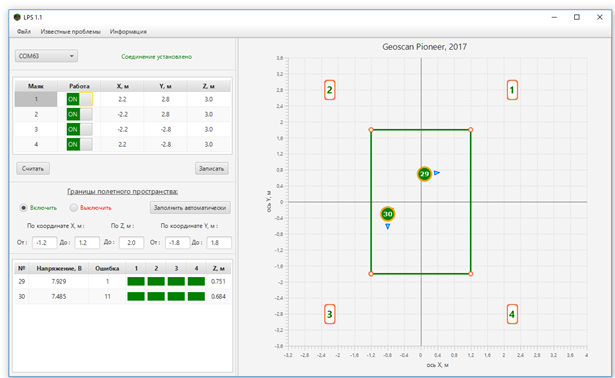
При первом запуске программы заполните пустые поля координат для маяков. Как это сделать:
Расстояние (в метрах) между излучателем 1 и 2 поделите на 2. Полученное значение введите в поле X со знаком «минус» для маяков №2 и №3 и без знака «минус» для маяка №1 и 4.
Расстояние между излучателем 2 и 3 также поделите на 2 и введите значение в поле Y со знаком «минус» для маяков №3 и №4 и без знака «минус» для маяков №1 и №2.
В поле Z введите высоту каждого излучателя над уровнем пола.
После ввода координат полетная зона сформирована и отображается в правом окне программы зеленой линией. По умолчанию углы полетной зоны отстоят от излучателя на 1 м.
Нажмите кнопку на плате управления, чтобы включить систему. После этого должен загореться белый светодиод «питание» и зеленый «статус». Если этого не произошло, проверьте заряд аккумулятора либо надёжность подключения по USB.
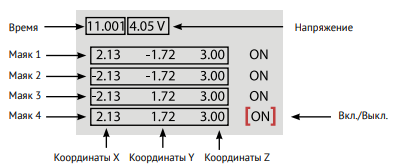
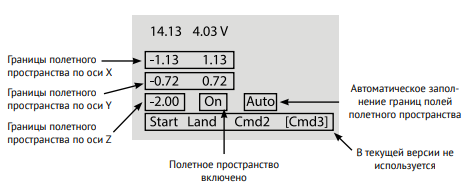
Вверху встроенного экрана отображается время с момента включения и текущий уровень напряжения аккумулятора. При падении напряжения ниже 3 В начнет мигать светодиод «статус», сообщая о необходимости подзаряда. В этом случае подключите плату через порт micro-usb к компьютеру или зарядному устройству (output 5В 2А).
На встроенном экране координаты отображаются так же, как в интерфейсе программы LPS.
Чтобы изменить любой из параметров системы, выберите его поворотом энкодера, а затем надавите на него. После коррекции (также поворотом) нажмите на энкодер второй раз, чтобы подтвердить изменения и вернуться в меню.
На втором экране меню можно вручную настроить отступы от границы полетного пространства или включить режим «Auto» - тогда все настроится автоматически. Там же можно отключать ограничения полетной зоны.
Важно
Раздел находится на модерации.
Бортовой модуль¶
Важно
Бортовой модуль не входит в комплект системы УЗ-навигации!
Модуль монтируется на основной плате «Пионера» сверху с помощью 4-х винтов М3.
Модуль оснащен двумя микрофонами, которые позволяют контроллеру оценивать время прихода и разность фаз сигналов с излучателей. Далее происходит синхронизация с блоком управления по радиоканалу и определяется точное положение квадрокоптера в пространстве, а также его скорость.
Для работы модуля необходимо расположить включенный квадрокоптер в зоне действия ультразвуковых излучателей системы УЗ Локус.
Обновление системы УЗ-навигации¶
Для корректной работы системы все её компоненты (блок управления и бортовой модуль) должны использовать актуальное ПО. Выберите раздел соответсвующий обновляемому компоненту и следуйте инструкции.
Примечание
Прошивка блока управления УЗСН Локус(rev 1.0) и бортового модуля навигации выполняется с помощью одного файла.
Вам потребуется: программа Pioneer Station и файл с актуальной прошивкой платы управления который вы можете скачать ниже либо из раздела Прошивки и ПО.
Выполните следующие действия для обновления прошивки модуля навигации USNav.
Нажмите и удерживайте одновременно 2 кнопки на плате: Вкл/Выкл и Меню(энкодер). Не отпуская их включите блок управления подключив его к компьютеру кабелем USB. При такой последовательности плата УЗСН запустится в режим обновления прошивки(загрузчика).
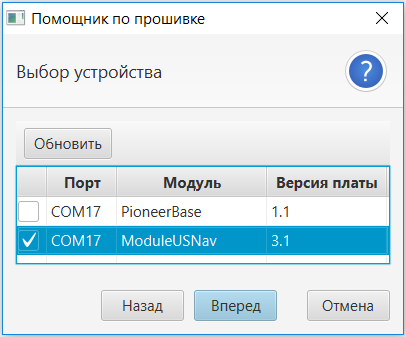
Запустите PioneerStation, cразу перейдите в пункт меню обновление прошивки (без нажатия «Подключение по USB») и следуйте указаниям помощника.
При выборе устройства в PioneerStation, поставьте галочку напротив модуля ModuleUSNav.
Подсказка
Процесс может занять до 5 минут, не отключайте блок управления до окончания прошивки.
Вам потребуется: программа Pioneer Station и файл с актуальной прошивкой бортового модуля который вы можете скачать ниже либо из раздела Прошивки и ПО.
Выполните следующие действия для обновления прошивки модуля навигации USNav.
Отключите плату подключения дополнительных модулей если она установлена на Pioneer. Для этого достаточно отключить оба шлейфа. В противном случае, помощник по прошивке не обнаружит модуль навигации.
Установите модуль навигации на Pioneer.
Зажмите кнопку Старт на плате автопилота и удерживая её подключите аккумулятор. Таким образом обе платы (автопилот и модуль навигации) перейдут в режим загрузчика. Все светодиоды на плате автопилота и модуле навигации должны гореть постоянно!
Важно
Ввод модуля в режим загрузчика должен происходить с помощью аккумулятора! Запуск режима загрузчика с помощью USB не приведёт к должному результату. В ряде случаев модуль навигации не входит в режим загрузчика с первого раза и требует повторного подключения аккумулятора.
При помощи USB-кабеля подключите плату автопилота к компьютору.
Запустите Pioneer Station и нажмите на значок квадрокоптера в левом верхнем углу окна программы. В выпадающем меню нажмите Обновление прошивки и следуйте инструкциям помощника.
При переходе к пункту Выбор устройства в списке будет отображаться не только базовая плата квадрокоптера PioneerBase, но и модуль навигации BeaconUSNav. Поставьте галочку напротив модуля и нажмите Далее.
При выборе источника прошивки необходимо выбрать пункт Из файла, и указать путь к предварительно скачанной прошивке. Дождитесь окончания прошивки, после которой квадрокоптер запуститься в штатном режиме.
Внимание
В случае если модуль навигации не вышел из режима загрузчика после обновления прошивки - воспользуйтесь альтернативной прошивкой(Прошивка если модуль не выходит из режима загрузчика).
Важно
Раздел находится на модерации.