Плата подключения дополнительных модулей¶
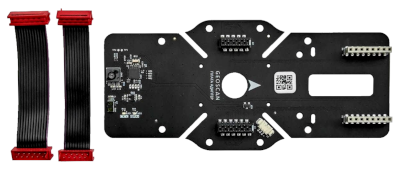
Плата-адаптер используется для подключения дополнительной полезной нагрузки к «Пионеру».
Плата крепится на нижнюю часть квадрокоптера вместо крышки отсека аккумулятора при помощи стоек и винтов М3. При установке ориентируйте плату так, чтобы стрелка находилась снизу и указывала в ту же сторону, что и стрелка на основной плате квадрокоптера. Сверху на плате расположены два разъема. Используйте их для подключения адаптера к плате автопилота с помощью шлейфов, идущих в комплекте. На нижней поверхности расположены два разъема для подключения модулей. Модули подключаются «насквозь» через плату.
Предупреждение
Обратите внимание, шлейфы подключения имеют разное количество пинов (10 и 12). Убедитесь, что Вы подключаете шлейф в соответствующий разъём!
Ревизии¶
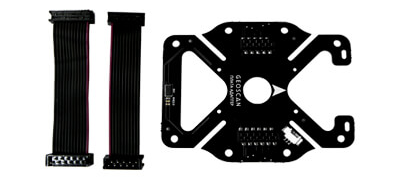
Особенности версии 4.0:
Встроенный модуль дальномера
Встроенный модуль оптического позиционирования
Возможность подключения камеры OpenMV
Разъём подключения модуля камеры для работы с FPV-комплектом
Особенности версии 2.0:
Встроенный модуль дальномера
Разъём подключения модуля камеры для работы с FPV-комплектом
Платы расширения оснащены лазерным дальномером. Он позволяет точно определять высоту над поверхностью в пределах 0 - 4 м. Дальномер активируется в режиме удержания высоты. При этом «Пионер» будет сохранять одинаковое расстояние от поверхности, даже если она неровная. Пролетая над препятствием или впадиной, квадрокоптер будет менять высоту. Если закрыть датчик рукой или другим предметом, «Пионер» будет набирать высоту до тех пор, пока расстояние до препятствия не вернется к прежнему значению, или пока квадрокоптер не упрется в потолок.
Предупреждение
Перед использованием платы-адаптера убедитесь, что на модуле оптического позиционирования и дальномере нет заводской плёнки!
Пример 1¶
Данные с дальномера можно считывать и использовать для управления квадрокоптером. В качестве примера приведена программа, меняющая цвет светодиодов на «Пионере» в зависимости от расстояния до земли. Используйте Pioneer Station, чтобы загрузить программу на «Пионер».
Примечание
Дальномер неактивен в режиме полета по GPS. Если программа не работает, откройте вкладку параметры автопилота в Pioneer Station и выберите набор параметров «LPS» или «OPT». Также можно вручную поменять значение параметра BoardPioneer_modules_gnss на 0,0.
-- https://learnxinyminutes.com/docs/ru-ru/lua-ru/ ссылка для быстрого ознакомления с основами языка LUA
-- упрощаем вызов функции получения расстояния с лазерного дальномера
local range = Sensors.range
-- количество светодиодов на основной плате пионера
local ledNumber = 4
-- создание порта управления светодиодами
local leds = Ledbar.new(ledNumber)
-- функция смены цвета светодиодов
local function changeColor(red, green, blue)
-- меняет поочередно цвета каждого из 4-х светодиодов
for i = 0, ledNumber - 1, 1 do
leds:set(i, red, green, blue)
end
end
function callback(event)
end
-- создаем таймер, который будет каждую десятую секунды считывать расстояние до пола
timerRangeRead = Timer.new(0.1, function ()
-- считываем показания в метрах с лазерного дальномера (он идет 1-м в списке) подключенного датчика расстояния
distance = range()
r, g, b = 0, 0, 0
-- при превышении допустимого расстояния лазерного дальномера датчик выдает константу 8.19 м
if (distance >= 8.19) then
-- в таком случае светодиоды загораются красным
r = 1
else
-- меняем яркость светодиодов в зависимости от расстояния (~1.5 - максимальное расстояние для лазерного дальномера на плате адаптере)
g = math.abs(distance / 1.5)
end
-- меняем цвет светодиодов на посчитанные значения
changeColor(r, g, b)
end)
-- запускаем таймер
timerRangeRead:start()
Пример 2¶
Пример демонстрирует, как реализовать взаимодействие камеры OpenMV c модулем захвата груза при помощи платы подключения дополнительных модулей версии 4.0. В данном скрипте электромагнит, расположенный на модуле захвата, отпускает груз при попадании маркера в объектив камеры.
Подключите программируемую камеру OpenMV и модуль захвата груза к плате подключения дополнительных модулей. Не забудьте зафиксировать оба модуля с помощью винтов и стоек.
Используйте Pioneer Station, чтобы загрузить программу на «Пионер». Для загрузки программы на камеру OpenMV воспользуйтесь OpenMV IDE предварительно скачав версию для своей OC.
Скрипт для автопилота:
local unpack = table.unpack -- импортируем функцию для распаковки массивов
local ledNumber = 4 -- количество светодиодов
local leds = Ledbar.new(ledNumber) -- инициализация объекта управления светодиодами
local height = 1 --высота полета коптера
local rc = Sensors.rc
local magneto = Gpio.new(Gpio.C, 3, Gpio.OUTPUT)
local uartNum = 4 -- номер Uart интерфейса (USART4)
local baudRate = 9600 -- скорость передачи данных
local dataBits = 8
local stopBits = 1
local parity = Uart.PARITY_NONE
local uart = Uart.new(uartNum, baudRate, parity, stopBits) -- создание протокола обмена
local colors = {
{1, 0, 0}, -- (1) красный
{1, 1, 1}, -- (2) белый
{0, 1, 0}, -- (3) зеленый
{1, 1, 0}, -- (4) желтый
{1, 0, 1}, -- (5) фиолетовый
{0, 0, 1}, -- (6) синий
{0, 0, 0} -- (7) черный/отключение светодиодов
}
-- переключение цвета светодиодов
local function changeColor(color)
-- проходим в цикле по всем светодиодам с 0 по 3
for i=0, ledNumber - 1, 1 do
leds:set(i, unpack(color))
end
end
-- обработка событий
function callback(event)
--if event == Ev.TAKEOFF_COMPLETE then
-- changeColor(colors[3]) -- зеленый
-- Timer.callLater(5, function () ap.push(Ev.MCE_LANDING) end)
--end
if event == Ev.COPTER_LANDED then
ap.push(Ev.ENGINES_DISARM)
changeColor(colors[7]) -- выключаем светодиоды
end
end
function getc()
while uart:bytesToRead() == 0 do
end
return uart:read(1)
end
function ord(chr, signed)
local specifier = "B"
if signed then specifier = "b" end
return string.unpack(specifier, chr)
end
function getData() -- функция приёма пакета данных
while true do -- ждём приёма начала пакета
if (ord(getc()) == 0xBB) then break end
end
local ledstate = ord(getc())
local dx = ord(getc(), true)
local dy = ord(getc(), true)
ord(getc()) -- принять конец пакета
return ledstate, dx, dy
end
local takerFunction = function () -- функция для периодического чтения данных из UART
local ledstate, dx, dy = getData()
if (ledstate == 0) then
changeColor(colors[1]) -- красный - не найден
magneto:set()
else
changeColor(colors[3]) -- зелёный - найден
magneto:reset()
end
end
markerTimer = Timer.new(0.01, function () takerFunction() end)
magneto:set()
markerTimer:start()
Скрипт для OpenMV:
import sensor, image, time, math, pyb
from pyb import UART, LED
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
screen_w = 160
screen_h = 120
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(30)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
uart = UART(3)
uart.init(9600, bits=8, parity=None, stop=1, timeout_char=1000)
track_id = 3 # qr код, за которым следим, и о котором передаём информацию на квадрокоптер
clock = time.clock()
def sendPacket(ledState, dx, dy):
uart.writechar(0xBB) # packet begin byte
uart.writechar(ledState)
uart.writechar(dx.to_bytes(1, 'big')[0])
uart.writechar(dy.to_bytes(1, 'big')[0])
#uart.writechar(crc) # no crc now
uart.writechar(0xFF) # packet end byte
while(True):
clock.tick()
img = sensor.snapshot()
apriltag_array = img.find_apriltags()
found = False
if len(apriltag_array) == 0:
pass
else:
found = True
for tag in apriltag_array:
img.draw_rectangle(tag.rect(), color = (255, 0, 0))
img.draw_cross(tag.cx(), tag.cy(), color = (0, 255, 0))
#red_led.off()
#green_led.on()
print_args = (tag.id(), (180 * tag.rotation())/math.pi)
print("Tag Number", str(tag.id()))
dx = int(tag.cx() - screen_w/2)
dy = int(tag.cy() - screen_h/2)
print("dx=" + str(dx) + ", dy=" + str(dy))
#if (tag.id() == track_id):
#found = True
#sendPacket(1, dx, dy)
sendPacket(1, dx, dy)
if not found:
sendPacket(0, 0, 0) # send info, no qr code found
print(clock.fps())
Прошивка платы расширения¶
Для обновления прошивки платы расширения выполните следующие действия:
Скачайте актуальную прошивку для модуля расширения по ссылке - Module Optical Flow 1.25.
Загрузите плату расширения в режиме «бутлоадера». Для этого модуль должен быть установлен на пионер и подключён к плате автопилота с помощью шлейфов, идущих в комплетке.
Удерживая нажатой кнопку «Старт» на базовой плате, подключите её с помощью USB-кабеля к ПК. При этом зелёный и красный светодиоды, расположенные на плате расширения, будут гореть постоянно как и все светодиоды на плате автопилота. (Обе платы перейдут в режим прошивки).
В PioneerStation перейдите в раздел обновления прошивки и выберите устройство PioneerAdapter. Нажмите «Далее»
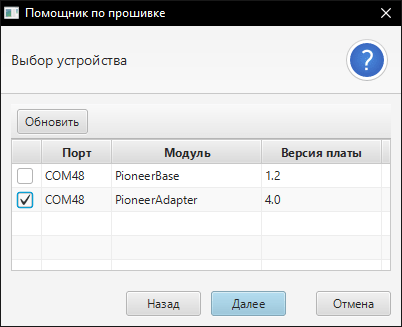
В качестве источника, выберите вариант обновления «Из файла» и укажите путь к ранее скачанному файлу. Нажмите «Прошить» и дождитесь окончания прошивки.
Ошибка
Важно! Данное объявление актуально только для пользователей плат версии 1.6.3.
Если при обновлении прошивки модуль PioneerAdapter не отображается в списке доступных устройств, необходимо обновить загрузчик платы. Подробная инструкция доступна по ссылке: Обновление загрузчика АП 1.6.3 (PDF)