С помощью данного модуля можно запускать скрипты из внутренней памяти модуля Raspberry Pi Zero, а также программировать квадрокоптер Пионер на Python с использованием библиотеки pioneer-sdk.
Инструкция по запуску Python-скриптов с библиотекой pioneer-sdk¶
Скачайте программу для записи образа на SD-карту: balenaEtcher
Вставьте SD-карту в компьютер и запустите balenaEtcher
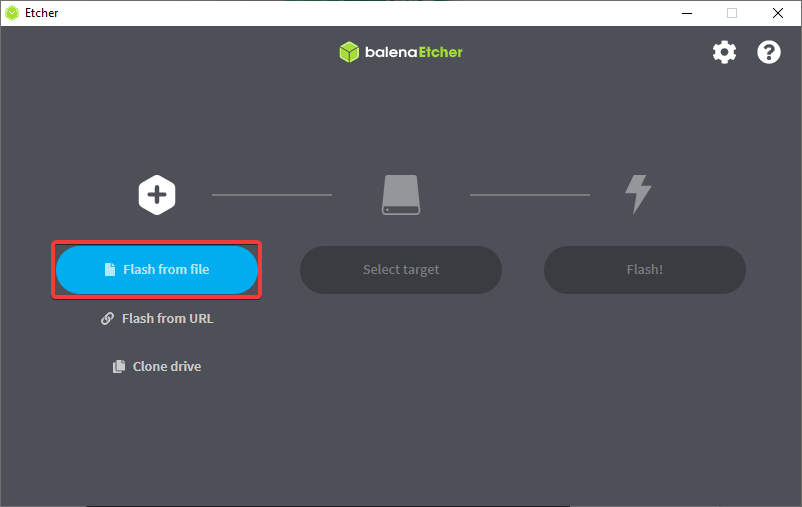
Нажмите Flash from file и выберите ранее скачанный образ
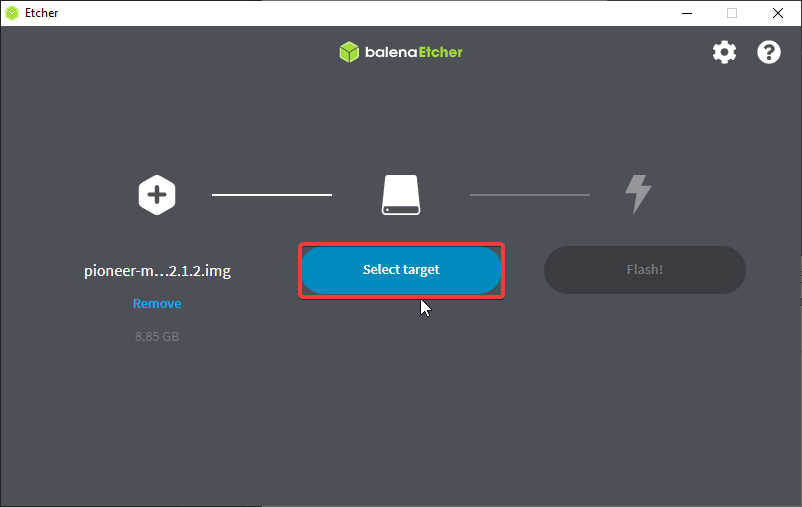
Нажмите Selest target и выберите вашу SD карту
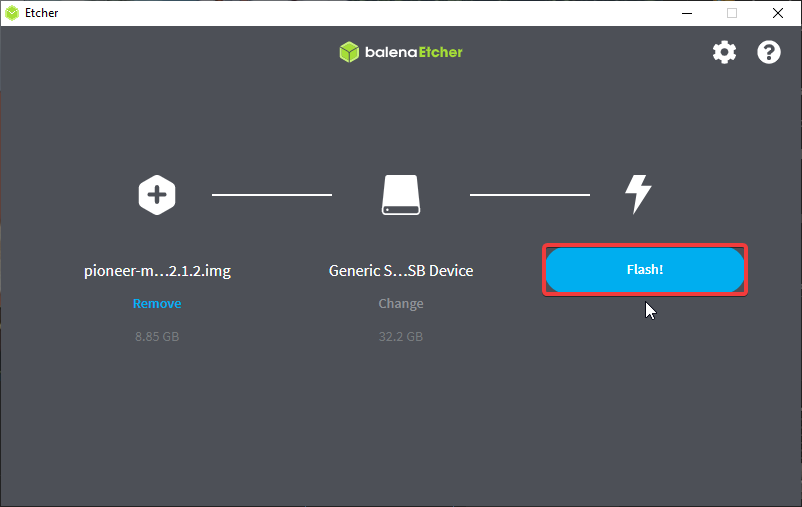
Нажмите Flash и дождитесь завершения записи образа
Извлеките SD-карту из компьютера и вставьте её в специальной слот, расположенный на обратной стороне модуля
Подключите аккумулятор и дождитесь появления Wi-Fi сети «PiZero-(12 символов)», может потребоваться до 2 минут
Подсказка
Обратите внимание, что при первом запуске образа - нельзя отключать аккумулятор до появления Wi-Fi сети, если вы отключили питание до появления Wi-Fi сети - перезапишите образ на SD-карту.
Обратите внимание, что при вводе пароля - символы невидимы
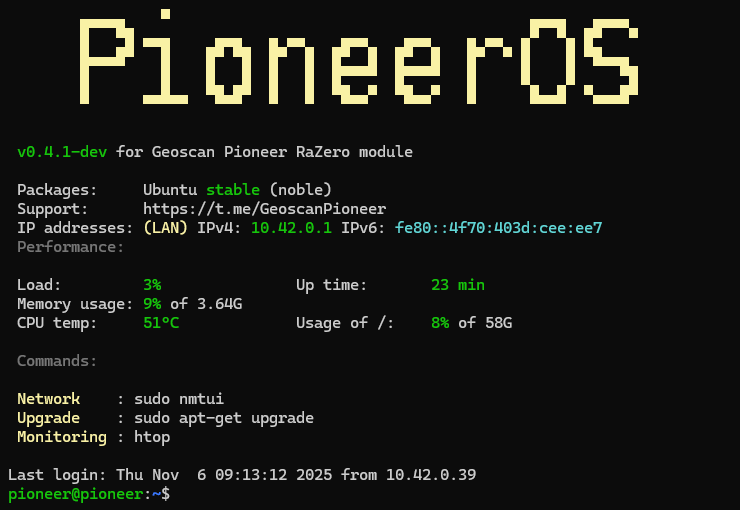
Подключение по SSH завершено!
Подсказка
Если вы используете Windows и получаете ответ «Connection closed by 10.42.0.1 port 22», то вам требуется включить правило брандмауэра с именем «OpenSSH-Server-In-TCP».
Изменение способа подключения к Wi-Fi
Вы можете изменить способ подключения к Wi-Fi сети модуля. По умолчанию пионер сам создает точку доступа wifi с именем «PiZero-(12 символов)».
Подключите SD-карту к компьютеру и откройте ее содержимое
Найдите и откройте конфигурационный файл netconfig находится по пути: /boot/firmware или /piosboot/firmware
Внутри файла находятся следующие параметры, измените их значение на требуемые и сохраните изменения
Параметр
Значение по умолчанию
Описание
HOTSPOT
yes
yes - режим точки доступа, no - режим подключения к Wi-Fi
HOTSPOT_SSID
default
Задает имя точки доступа, default (BoardName-{UUID})
HOTSPOT_PASSWORD
default
Задает пароль точки доступа, default (geoscan123)
WIFI_SSID
ubnt
Задает имя Wi-Fi сети к которой подключится модуль
WIFI_PASSWORD
1112223334
Задает пароль Wi-Fi сети к которой подключится модуль
Установите SD-карту в модуль, настройка завершена!
Подключитесь к модулю по SSH (инструкция выше)
Выполните команду в терминале:
sudopionet
C помощью клавиш ↔ и ↕ выберите вкладку Режим работы Вызовите меню нажатием Enter и выберите необходимый режим работы.
Выберите раздел Настройка точки доступа и настройте работу модуля в режиме точки доступа. Установите или выберите по умолчанию Имя сети, пароль и частоту работы(ГГц)
Выберите раздел Wi-Fi подключение и настройте работу модуля в режиме точки доступа. Установите или выберите из списка Имя сети(SSID) и Пароль.
Сохраните настройки с помощью клавиши S и выйдите из программы с помощью клавиши Esc
Для применения настроек необходимо перезагрузить борт (переподключить питание или выполнить команду: sudo reboot)
Подключите пульт и переведите тумблер SWB в нижнее положение (режим миссии).
Примечание
При использовании других примеров со страницы
Примеры программ
при создании объекта класса Pioneer() необходимо указать TCP-адрес дрона и порт 20556:
pioneer=Pioneer(tcp='10.42.0.1:20556')(еслиподключаетеськwifiточкедрона)pioneer=Pioneer(tcp='ip-адрес дрона из раздела с хот-спотом:20556')(еслидронподключаетсяквашейточкедоступа)
Примечание
При создании объекта класса Camera требуется указать дополнительный аргумент camera_ip и порт 8554:
camera=Camera(camera_ip="10.42.0.1:8554")(еслиподключаетеськwifiточкедрона)camera=Camera(camera_ip="ip-адрес дрона из раздела с хот-спотом:8554")(еслидронподключаетсяквашейточкедоступа)