Pioneer OS¶
PioneerOS — это операционная система, разработанная для квадрокоптеров серии Геоскан Пионер. Она представляет собой дистрибутив Linux, основанный на актуальной версии Ubuntu.
| Борт | Модуль | Pioneer Bricks | Pioneer Code | Обновление АП по Wi-Fi | Поддержка библиотек для ИИ | Pioneer-SDK2 |
|---|---|---|---|---|---|---|
| Пионер Мини 2 | Процессор c нейроускорителем | + | + | + | + | На борту |
| Пионер Базовый | Radxa Zero 3W | + | + | + | + | На борту |
| Пионер Базовый | Raspberry Pi Zero 2W | - | - | + | - | На ПК |
Доступные сервисы¶
Для использования сервисов необходимо выполнить подключение к точке доступа.
- Название точки доступа(SSID): BoardName-UUID (Например: PMINI2 / RaZero / PiZero)
- Пароль: geoscan123
Трансляция
Для получения изображения в реальном времени со всех бортовых камер
Просматривайте видеотрансляцию с основной или вспомогательной камеры.
Описание библиотек¶
Установка Pioneer OS на доп.модули¶
Pioneer OS можно установить на вычислительные модули Radxa Zero или Raspberry Pi Zero.
Сетевые настройки и PioNet¶
Воспользуйтесь готовой утилитой PioNet для настройки сети или выполните настройку вручную.
Выполните команду в терминале:
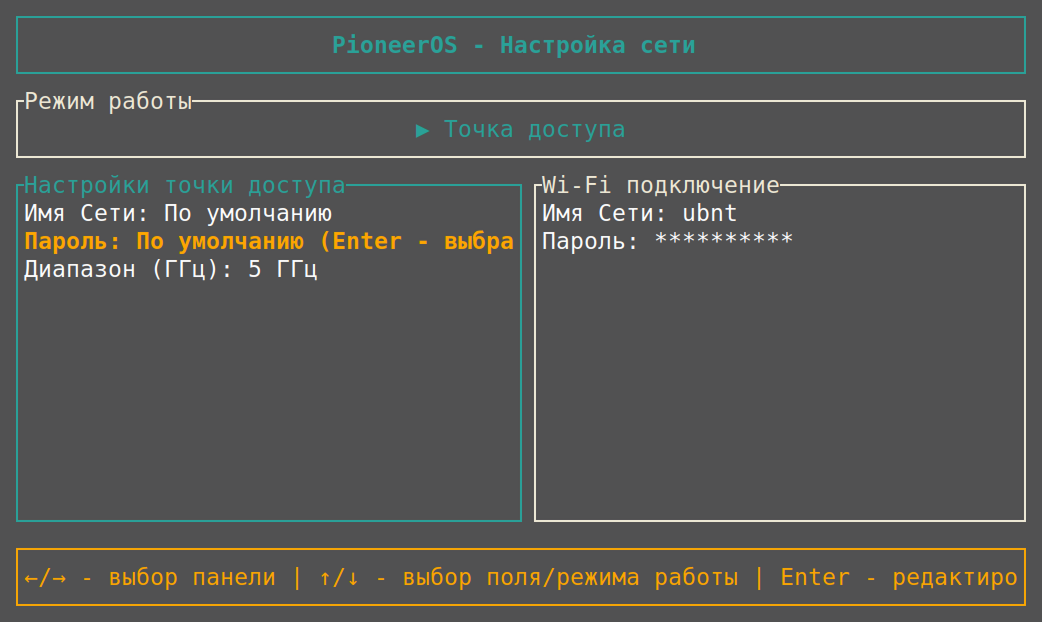
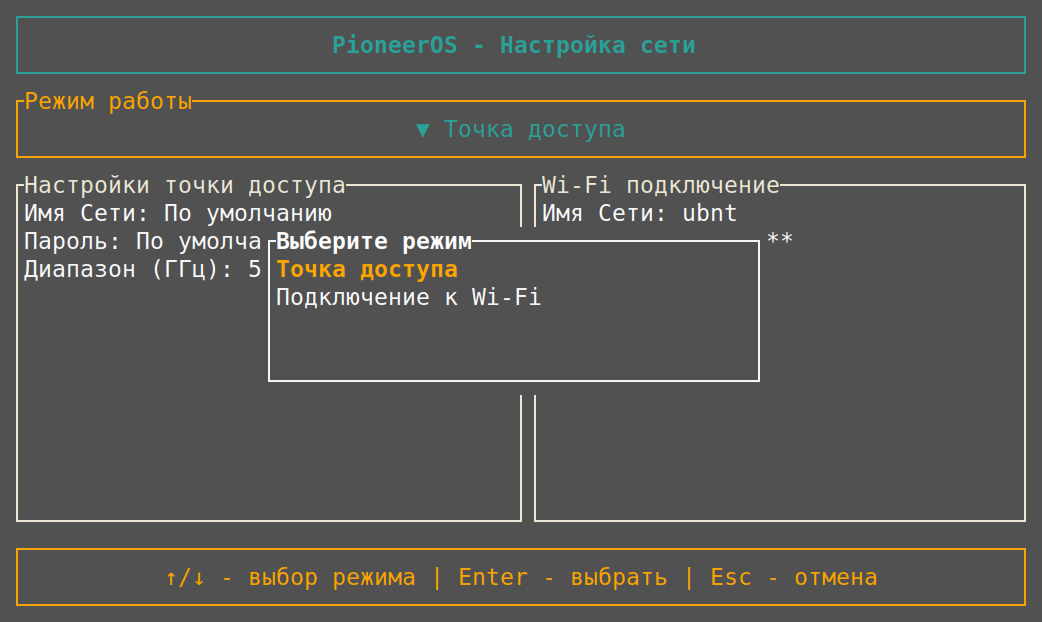
sudo pionetC помощью клавиш ↔ и ↕ выберите вкладку Режим работы Вызовите меню нажатием Enter и выберите необходимый режим работы.
Выберите раздел Настройка точки доступа и настройте работу модуля в режиме точки доступа. Установите или выберите по умолчанию Имя сети, пароль и частоту работы(ГГц)
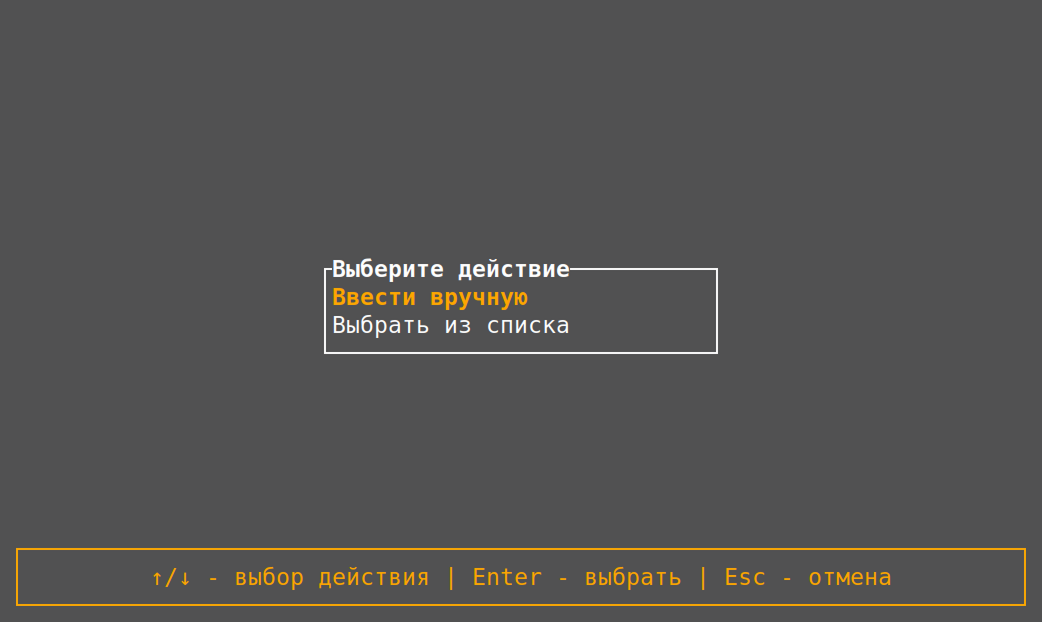
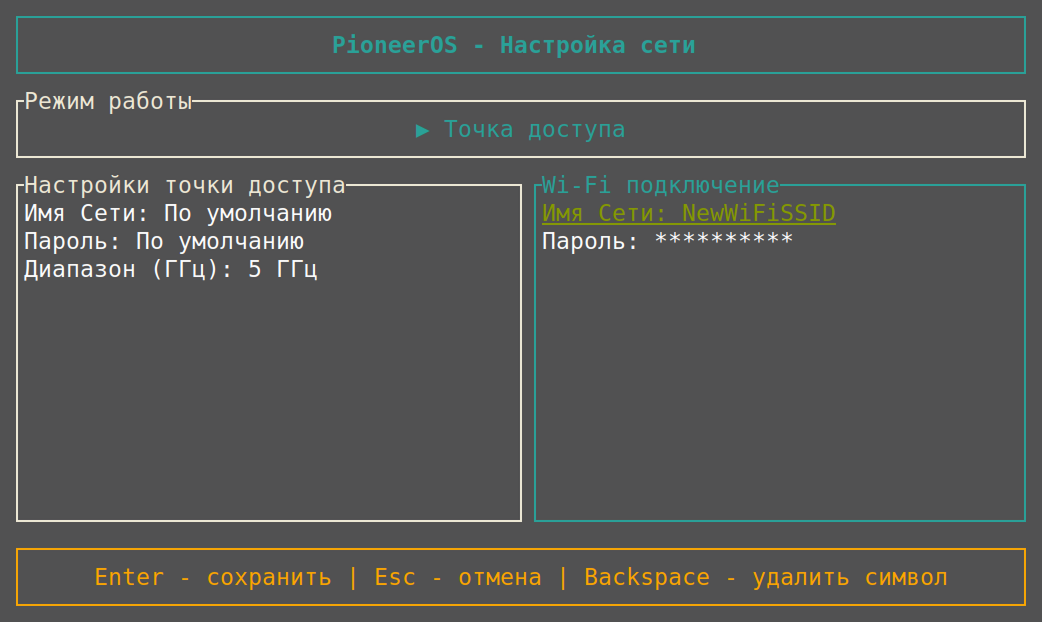
Выберите раздел Wi-Fi подключение и настройте работу модуля в режиме точки доступа. Установите или выберите из списка Имя сети(SSID) и Пароль.
Сохраните настройки с помощью клавиши S и выйдите из программы с помощью клавиши Esc
Для применения настроек необходимо перезагрузить борт (переподключить питание или выполнить команду: sudo reboot)