Подготовка к программированию¶
Эта инструкция поможет вам настроить компьютер и дрон для запуска первого Python-скрипта на квадрокоптерах Пионер.
Шаг 1. Установка необходимого ПО¶
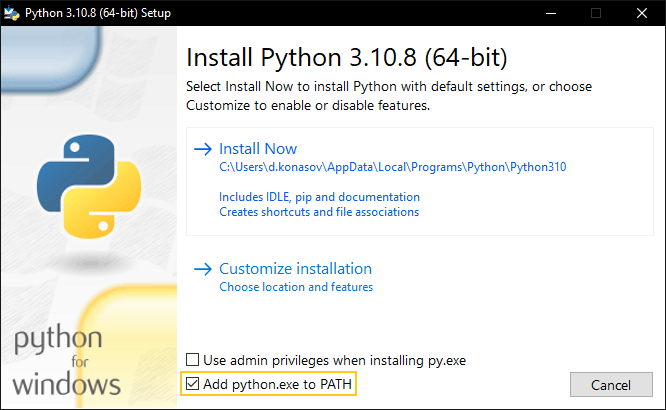
Скачайте и установите Python 3.12.9 для Windows.
Если у вас другая операционная система, скачайте актуальную версию на официальном сайте.
Примечание
Библиотека pioneer_sdk работает с версиями Python 3.8–3.12
Примечание
Обратите внимание на то, что при установке Python необходимо выбрать пункт Add Python to PATH
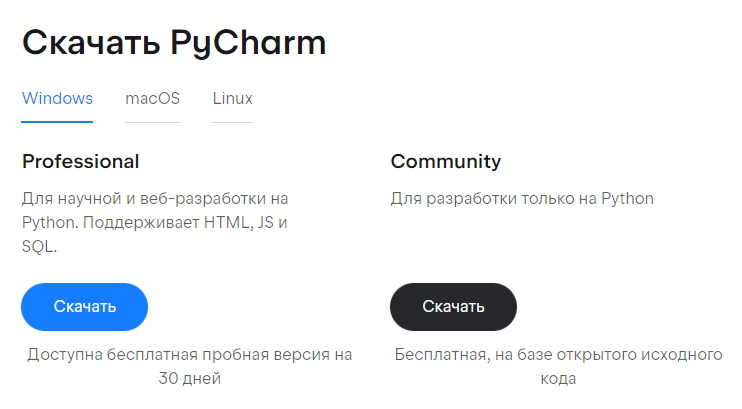
Скачайте и установите среду разработки PyCharm Community для вашей операционной системы.
Шаг 2. Настройка проекта PyCharm¶
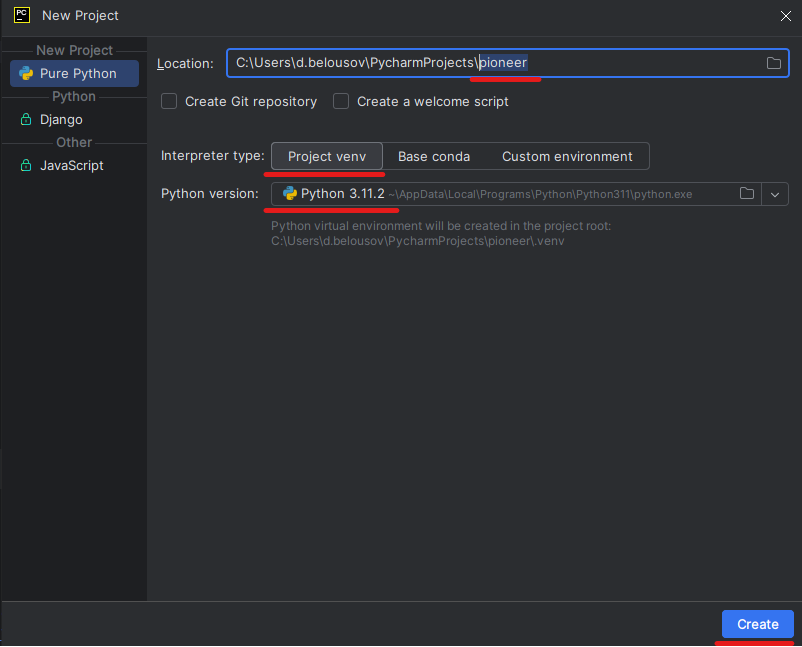
Создадим новый проект. В стартовом окне выберите New Project.
В поле Location укажите путь для сохранения проекта и название вашего проекта.
В блоке Interpreter type выберите Project venv.
В блоке Python version установите ваш Python.
Нажмите Create.
2. Установим библиотеку pioneer-sdk. Все библиотеки добавляются в проект с помощью команды pip install. Для этого в терминале PyCharm выполним команду:
pip install pioneer-sdkПосле установки можно запустить пример, использующий её.
Альтернативный способ установки библиотек (если не работает pip)
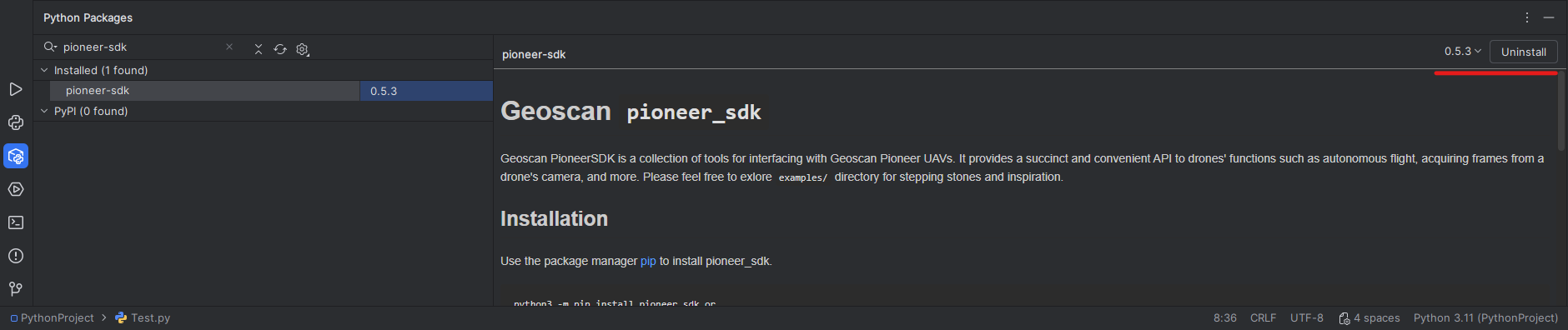
Вы можете установить библиотеку с помощью менеджера пакетов в PyCharm (Python Packages).
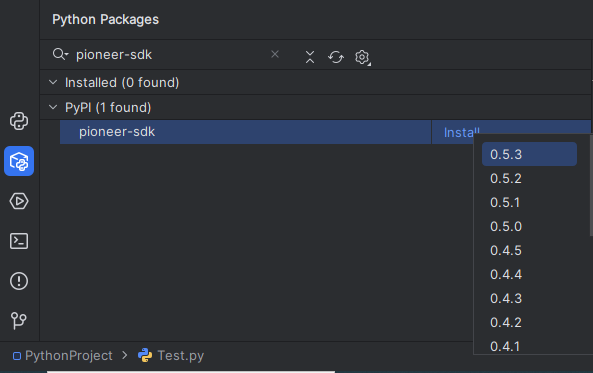
Откройте вкладку Python Packages.
В поиске найдите библиотеку pioneer-sdk.
Выберите последнюю версию — 0.5.3.
Нажмите кнопку Install.
В этом же окне можно удалять библиотеки — для этого нажмите Uninstall.
Настройка Пионера и Пионера Мини¶
Установите необходимую прошивку и загрузите параметры автопилота:
Прошивка для плат версий 1.2–1.6: Pioneer Base 1.6.10332
Параметры автопилота находятся в архиве с прошивкой (файл Pioneer_esp32.properties).
Примечание
Загружайте параметры только после того, как в Pioneer Station исчезнет флаг RESTART REQUIRED (необходима перезагрузка платы).
Достаточно загрузить параметры автопилота Для управления с помощью приложения
Примечание
Загружайте параметры без аккумулятора только после того, как в Pioneer Station исчезнет флаг RESTART REQUIRED (необходима перезагрузка платы).
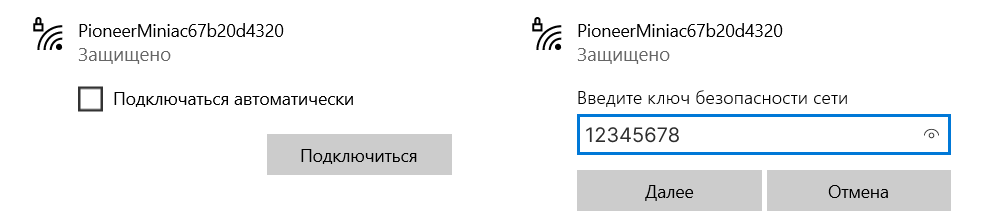
Подключите аккумулятор и подключитесь к Wi‑Fi сети квадрокоптера. Имя сети каждого коптера уникально, но пароль у всех одинаковый: 12345678.
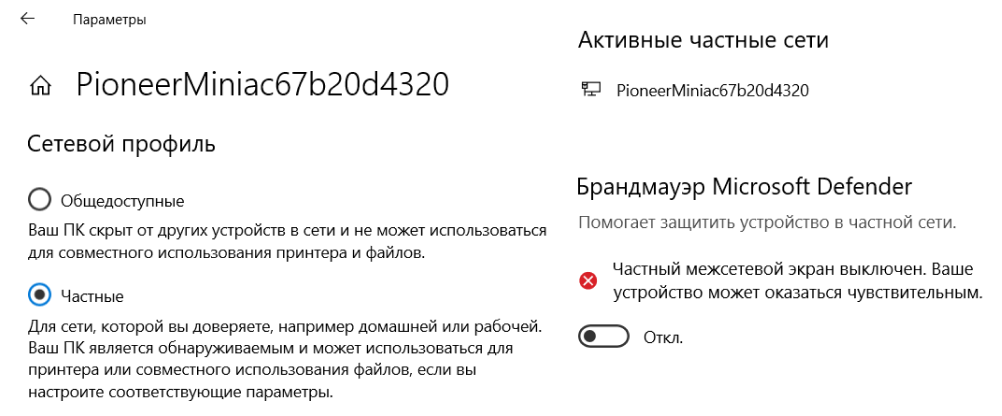
Настройка параметров сети:¶
После подключения нажмите правой кнопкой мыши на выбранную сеть и перейдите в Свойства.
Установите профиль сети как Частный.
Ниже перейдите в раздел «Настройка параметров брандмауэра и безопасности» и отключите работу брандмауэра для частных сетей.
Запуск скрипта¶
Теперь коптер готов выполнять скрипты. В качестве примера возьмём скрипт test.py. Данный скрипт позволит получить изображение с камеры, завести и заглушить моторы.
Есть 3 способа создать новый файл:
сочетание клавиш (Alt+Insert)
File (в левом верхнем углу) → New File or Directory
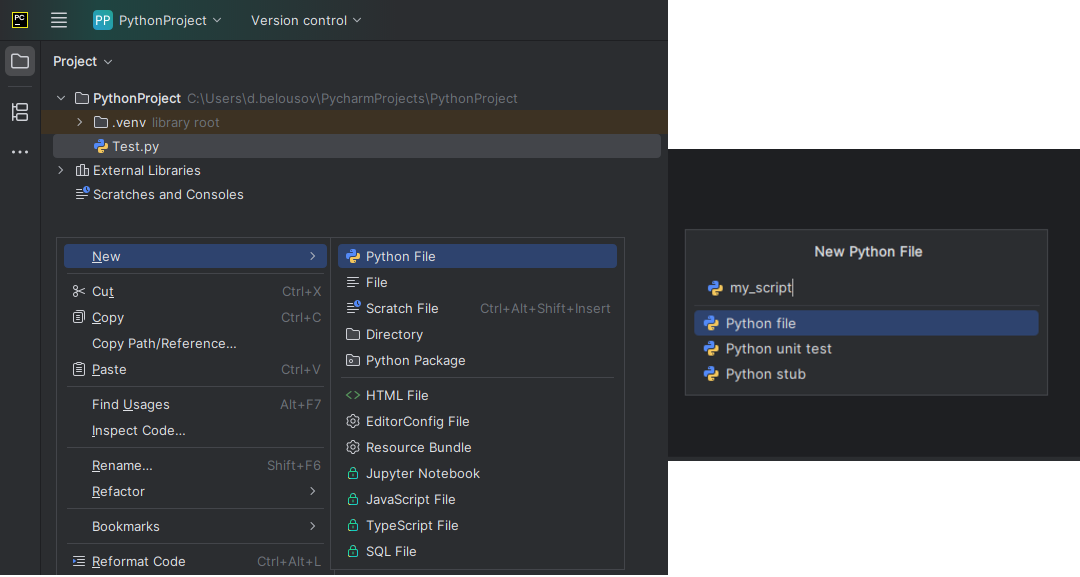
Щёлкнуть правой кнопкой мыши под деревом проекта → New
Выбираем тип файла Python File и указываем произвольное название.
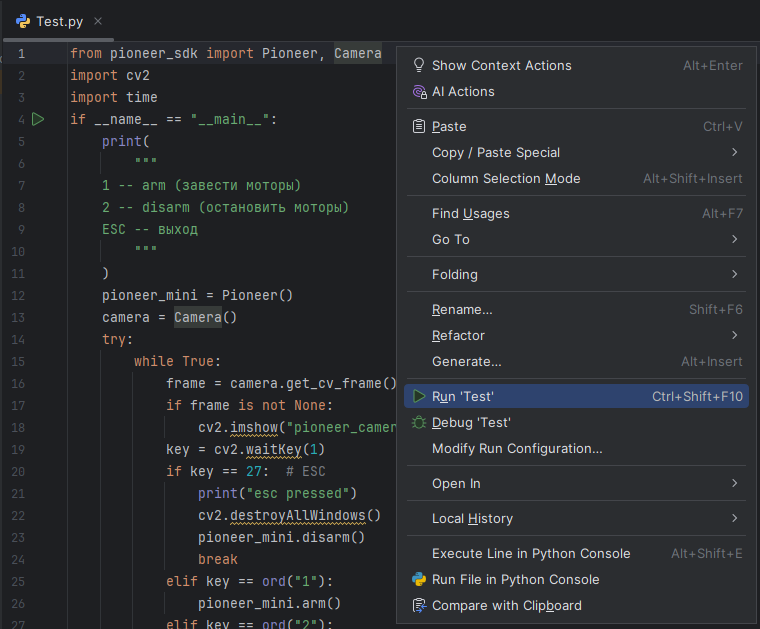
Копируем содержимое скрипта test.py в наш документ.
Для запуска скрипта щёлкните правой кнопкой мыши в любом месте программы, нажмите Run (название файла). Также можно нажать на пиктограмму с зелёным прямоугольником (либо нажать Ctrl + Shift + F10).
Остановка скрипта выполняется нажатием на иконку с красным квадратом (либо по нажатию Ctrl + F2).
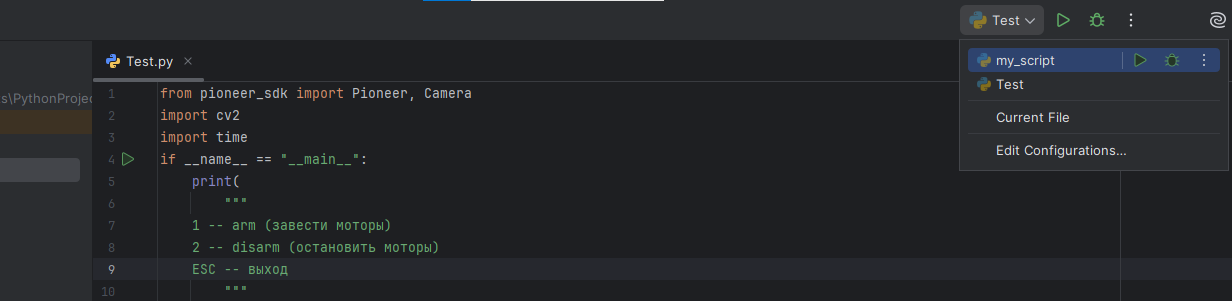
По умолчанию кнопка Run (зелёный треугольник в правом верхнем углу) запускает не тот файл, который открыт в редакторе, а тот, что указан в выбранной конфигурации (выпадающий список рядом с кнопкой). Всегда проверяйте, какая конфигурация выбрана перед запуском.
Надёжные способы запустить именно открытый в редакторе файл:
Убедиться, что название конфигурации совпадает с именем открытого файла.
Щёлкнуть правой кнопкой мыши в любом месте открытого файла, нажать Run (название файла)
В выпадающем списке рядом с кнопкой Run выбрать «Current File» — тогда всегда будет запускаться текущий файл.